导航
无穷级数
PriorityQueue
CTF
深度优先
网络图
技术美术
DOM型XSS
反射型XSS
AI绘图
insert into
CLIP
procast
C++11
Cookie
读书
工业物联网
SMBIOS
SAP调试归档任务
自动控制考研
simulink
2024/4/11 15:18:51
Simulink自动代码生成:Code Generation配置(一)
本节我们来学习 Code Generation 相关内容,可以说 Code Generation 配置是自动代码生成最重要的配置,虽然很多情况下很多配置不需要改动(默认的配置就满足需求),但是明白它们是如何影响代码生成的对我们项目开发还是相…
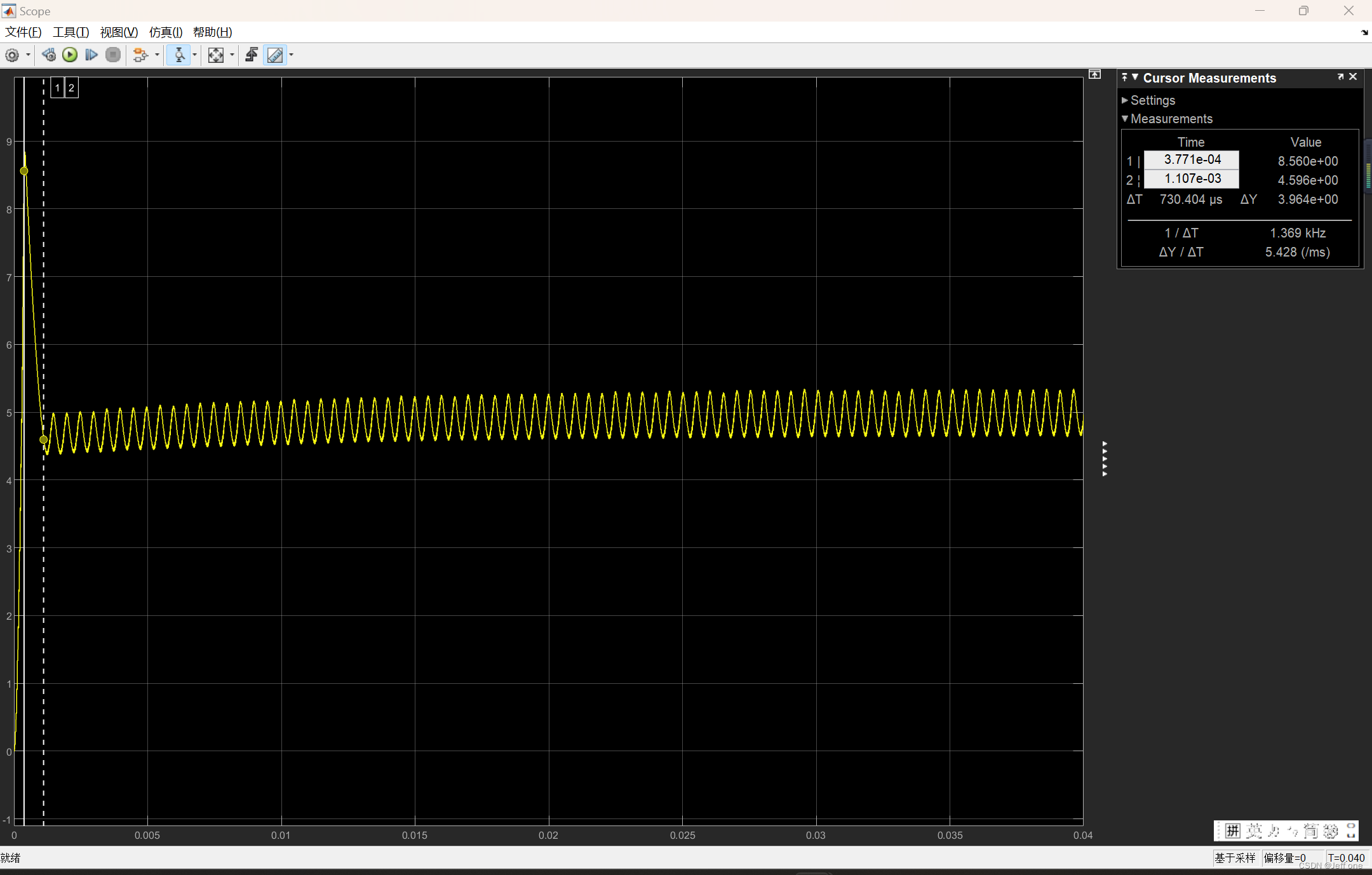
DC-MOTOR直流电机的simulink建模与性能仿真
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
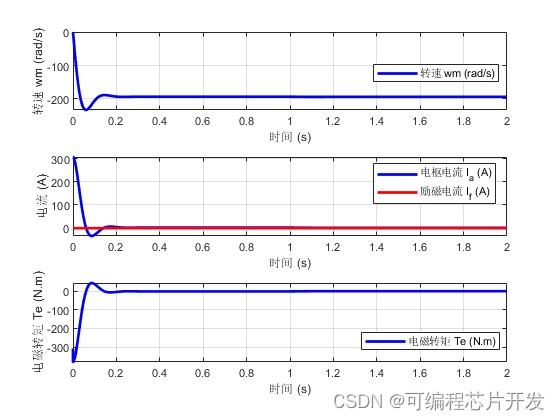
5.完整工程文件 1.课题概述 使用simulink建立一个DC电机模型,然后通过matlab调用该模型进行仿真,仿真结束之后,simulink的仿真输出结果通过matlab来显示。
2.系统仿真…

Simulink自动代码生成:Code Generation配置(二)
目录一. Optimization1.1 Default parameter behavior1.2 Pass reusable subsystem outputs as1.3 Data Initialization1.4 Optimization levels二. Report三. Comments四. 总结上一节我们学习了 Code Generation 配置的一部分,这节我们继续进行学习,本节…

风力发电电网系统的simulink建模与仿真
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
4.1风力发电原理与风机数学模型
4.2 电力电子变换器模型
4.3并网控制策略
5.完整工程文件 1.课题概述
风力发电电网系统的simulink建模与仿真。
2.系统仿真结果 3.核心程序与模型
版本:…

Simulink自动代码生成:原子子系统(Atomic Subsystem)
在前两节的基础上我们继续来学习代码的优化,没看过我前两篇文章的可以先去看一下,否则可能觉得模型出现的很突兀。这一节我们来学习原子子系统,废话不多说,我们直接开始学习,看完了这一篇你就会明白什么是原子子系统以…

Simulink自动代码生成:生成代码的基本设置
Simulink自动代码生成也被称作基于模型开发(BMD),相比于传统的手写代码方式能够尽量减少人为错误。模型本身可以用于仿真,单元测试等,更便于提前发现逻辑错误。同时只要约定好模型接口,就可以多人协作&…

Simulink自动代码生成:数据字典的建立及代码优化
在上一节《Simulink自动代码生成:生成代码的基本设置》的基础上,我们来对模型进行优化,使得生成的代码更能满足实际的需求,没看过我上一篇文章的可以点开如下链接: Simulink自动代码生成:生成代码的基本…

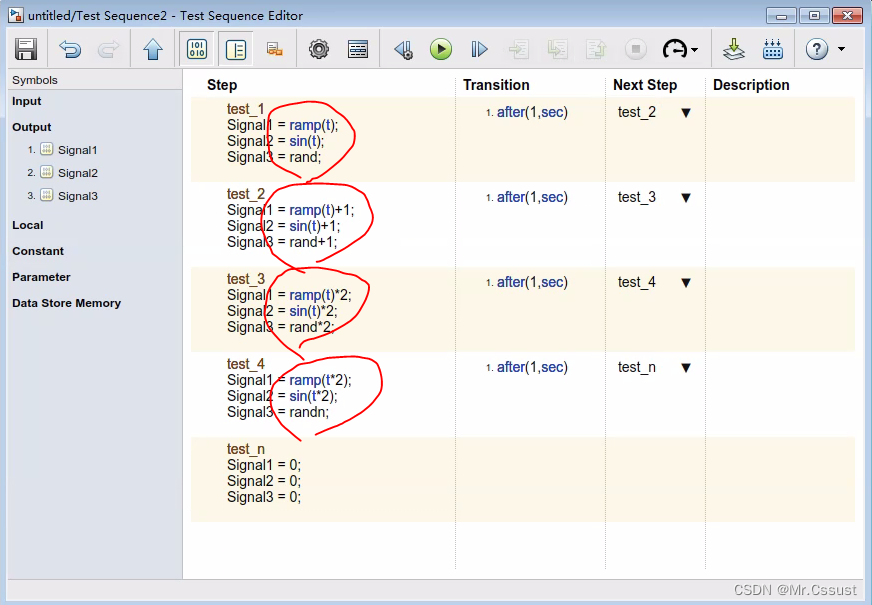
7. 模型测试 - Simulink Test 功能测试
文章目录 7. 模型测试 - Simulink Test 功能测试7.1 Simulink Test 简介7.2 创建Test harness7.2.1 创建Test harness方法7.2.2 Test harness界面配置7.3 测试用例编写及方法介绍7.3.1 简单在线仿真测试7.3.2 Test Sequence编写测试用例7.3.3 创建excel格式的测试用例方法7.3.4…
永磁同步电机速度环闭环控制
文章目录 1、速度环分析2、电机参数3、PI计算4、模型仿真4.1 模型总览4.2 实际转速与参考转速对比4.3 转矩波形4.4 相电流采样波形 模型下载地址: 链接: 速度闭环模型(速度电流双闭环)
1、速度环分析 2、电机参数
Udc24 V
Rs0.6
LdLq1.4e-3…
基于MATLAB的Simulink搭建一阶低通滤波器
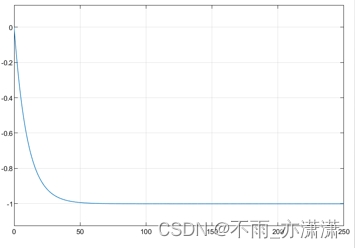
一、一阶低通滤波的原理 式子中的α作为滤波系数,X ( n ) 为本次的采样值,Y ( n − 1 ) 为上次滤波的输出值,Y ( n ) 为本次滤波后的输出值 一阶低通滤波器是一种常用的信号处理算法,用于去除高频噪声和平滑信号。其基本原理是通过…

Simulink自动代码生成:数据类型别名自定义
在手写代码时,我们经常能看到自定义数据类型别名,例如有些代码中将计算机默认的数据类型改为我们自己习惯的名称,如图所示。 目录一. 系统默认生成的别名二. 建立Simulink AliasType三. 修改Data Type Replacement四. 数据类型别名修改后的代…
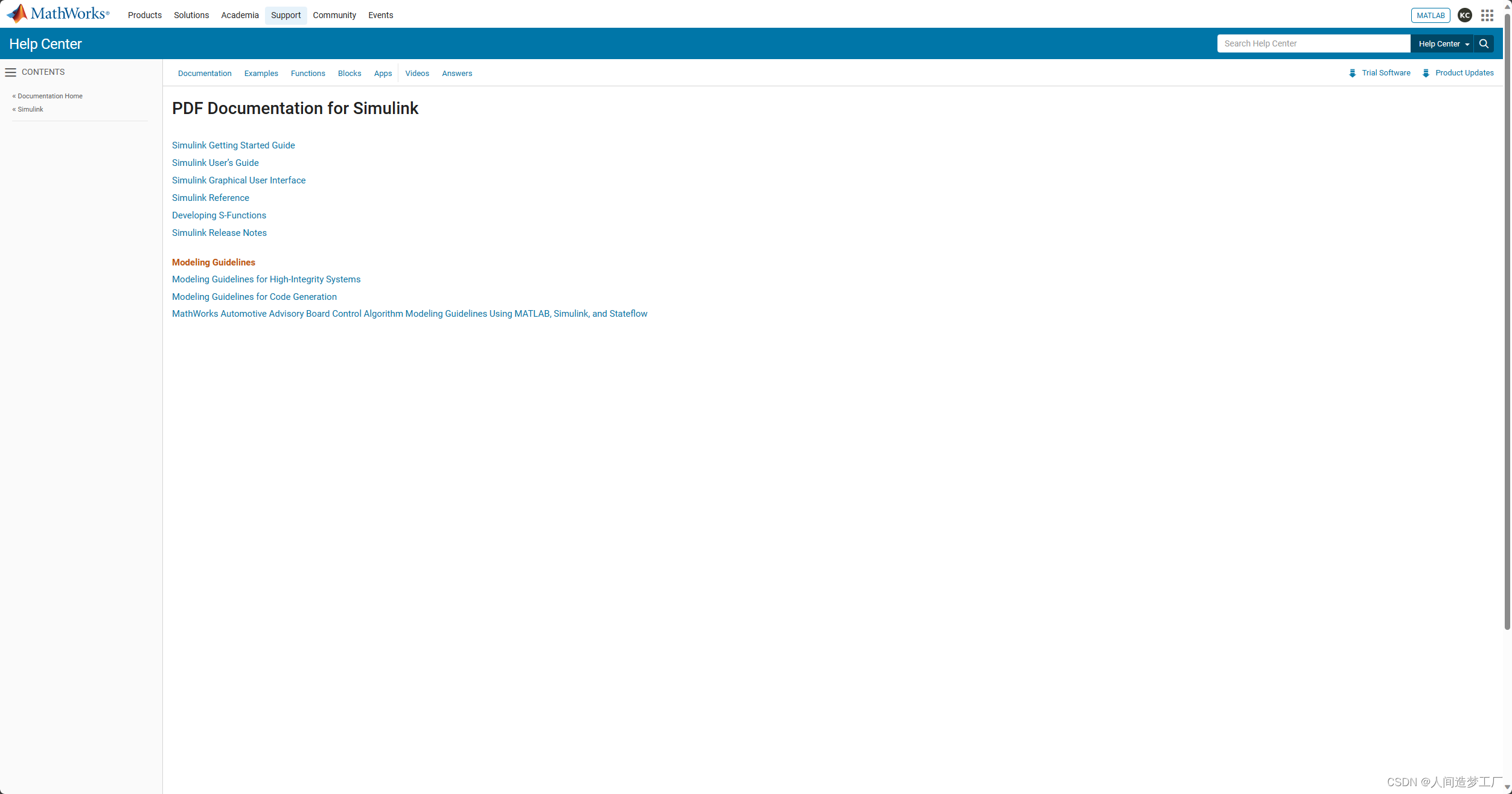
MATLAB 和 Simulink 官方文档下载地址
MATLAB 官方文档中文版下载网址:
https://ww2.mathworks.cn/help/pdf_doc/matlab/index.html
如图:
MATLAB 官方文档英文版下载网址: https://ww2.mathworks.cn/help/pdf_doc/matlab/index.html?langen
如图:
Simulink 官…

2_simulink搭建RCL_电阻电感电容模块
1_simulink简单入门_simulink仿真PID控制 2_simulink搭建RCL_电阻电感电容模块 基本元件 电阻 - 单位: 欧姆 Ω\varOmegaΩ 电压方程: uiRuiRuiR 电流方程: iuRi\frac{u}{R}iRu 电容 - 单位: 法拉 F\rm{F}F 电压方程: u1C∫0tidtu\frac{1}{C}\int_0^t{idt}uC1∫0tidt 电…
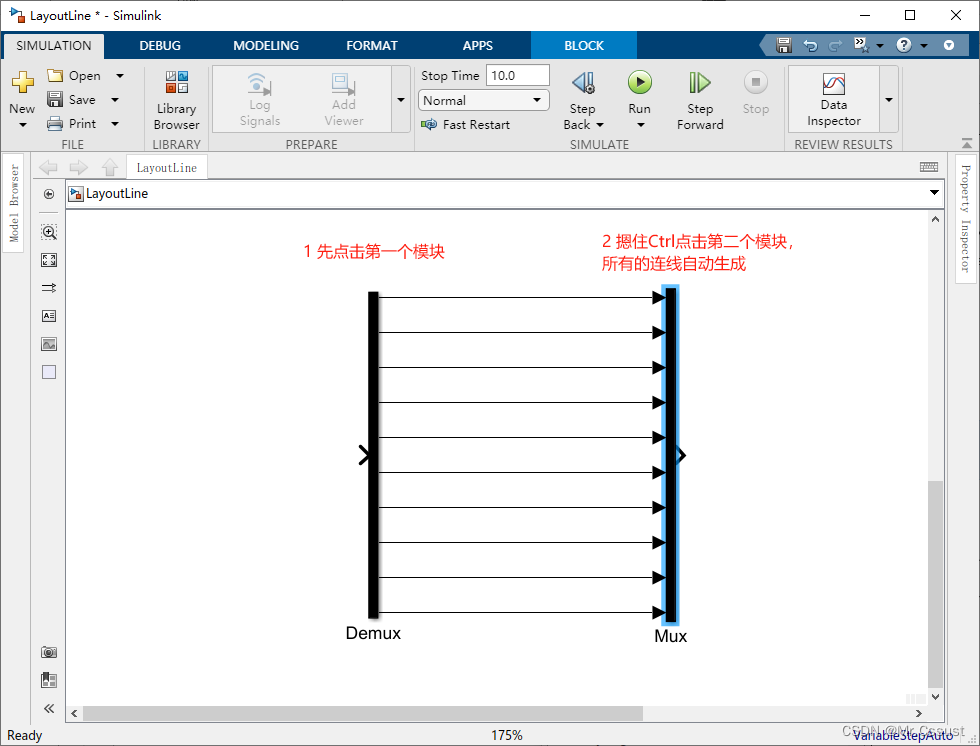
【研发日记】Matlab/Simulink技能解锁(五)——Simulink布线技巧
前言 见《【研发日记】Matlab/Simulink技能解锁(一)——在Simulink编辑窗口Debug》 见《【研发日记】Matlab/Simulink技能解锁(二)——在Function编辑窗口Debug》 见《【研发日记】Matlab/Simulink技能解锁(三)——在Stateflow编辑窗口Debug》 见《【研发日记】Matlab/Simulink…
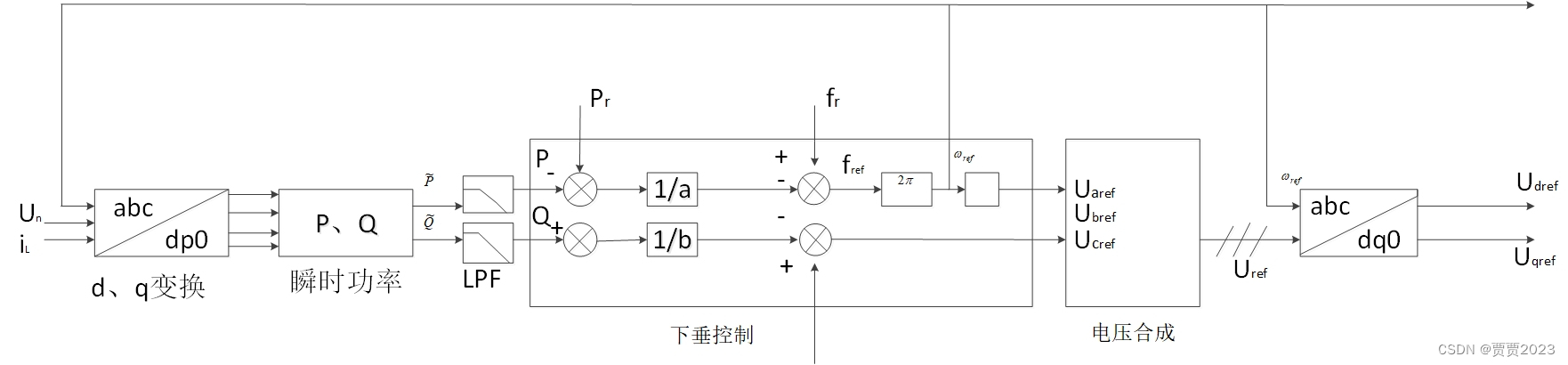
含PEMFC的热电联供系统能量管理策略Simulink仿真
1.光伏发电系统 在直流微电网中,光伏电池系统经过升压DC/DC变换器接入直流微电网提供功率。在不同的系统运行条件下,光伏电池系统有三种工作模式:MPPT 模式、下垂模式和空闲模式。由于光伏阵列的输出特性随着环境条件影响,光伏电池…

Simulink仿真模块 - Gain
Gain:将输入乘以常量 在仿真库中的位置为:Simulink / Commonly Used Blocks Simulink / Math Operations HDL Coder / Commonly Used Blocks HDL Coder / HDL Floating Point Operations HDL Coder / Math Operations 模型为: 说明 Gain 模块将输入乘以一个常量值(增益)。…
【Simulink】飞轮储能系统的建模与MATLAB仿真(永磁同步电机作为飞轮驱动电机)
目录
1 主要内容
2 结果分析
3 程序链接 1 主要内容
该仿真为飞轮储能系统的建模,包括电网侧和电机侧两部分模型,仿真采用永磁同步电机作为飞轮驱动电机,通过矢量控制的方式对其发电和电动的工况进行控制,同时,…
单端反激(离散系统仿真)
单端反激(离散系统仿真)
指令电压为0,电机微速旋转,补足指令电压。 把仿真变成离散的。
最大步长设置方法:如果是对于相控形式的电路,我觉得设置1e-4秒大概就够了,如果是对于斩波形式的电路,设置1e-6或者…
Simulink模型加密共享
1.前言
为了保护知识产权,有时候需要让用户能使用slx模型运行仿真,但是无法查看和修改模型和子系统的结构,这时可以用Simulink coder来生成受保护的模型。主要步骤如下:
(1)将slx模型的各个子系统唯一命名…
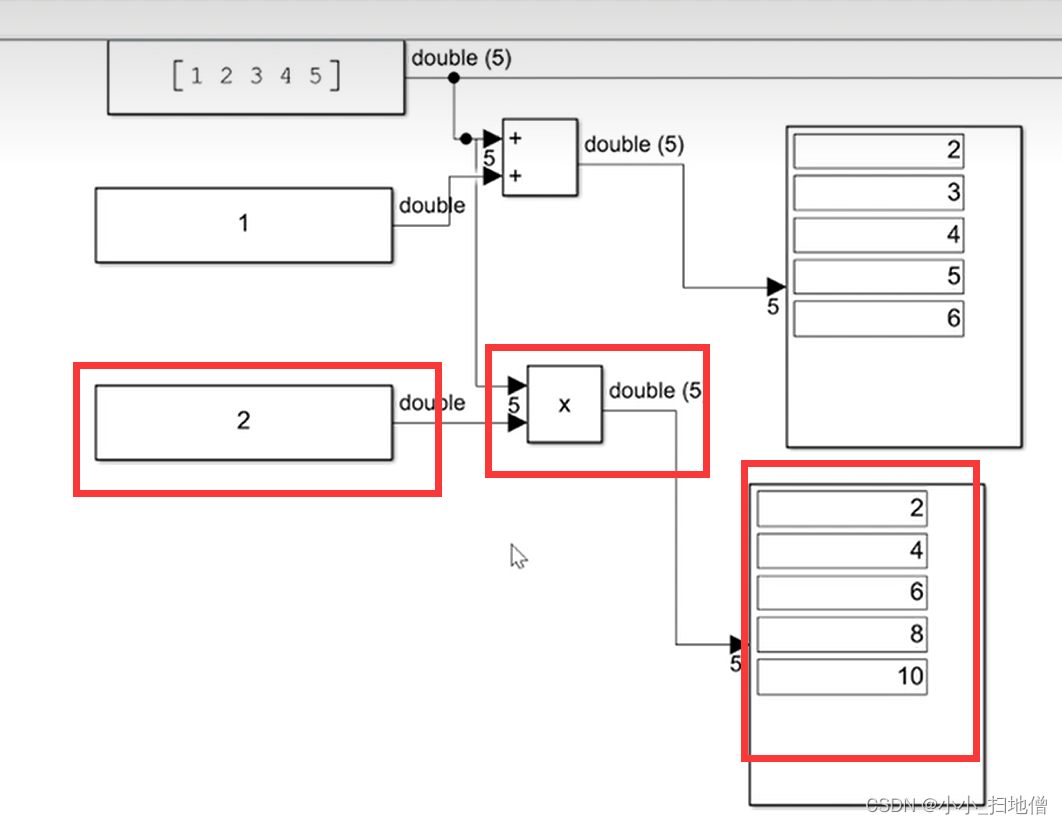
Simulink中如何使用数组以及创建数组、对数组索引、赋值
一、总体概述
1、数组的创建:Mux/constant
2、数组的切片:Demux
3、数组的索引:Selector
4、数组的赋值:Assignment
5、数组的运算:数组可只直接使用运算模块、点乘、矩阵运算
二、详细步骤
1、数组的创建
&am…

matlab中mux和bus的区别
http://www.360doc.com/content/10/1226/19/4146412_81542619.shtml
matlab中Bus 和mux的区别 http://blogs.mathworks.com/seth/2008/03/27/what-is-a-composite-signal/ 首先来看mux Mux模块的基本思想就是将多路信号集成一束,这一束信号在模型中传递和处理中…
2021-07-21
线性电源:AMS1117 输出:5V,3.3V,1.8V LM2940 输出:5V LM7815 输出:15V (以上三个线性稳压电源) LM2576 输出:3.3V、5.0V、12V、15V ( LMR16020 输出:隔离电源…
FMI标准:实现SkyEye与Simulink无需缝合的联合仿真
在汽车工业、航空、机电装备等领域存在着不同的应用、建模系统。在解决不同问题的过程中,为了仿真完整的系统,往往需要在不同的仿真程序之间进行交互,并且为了实现完整的调试,系统的集成必须确保来自不同供应商的仿真环境能够协同…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…
【Simulink系列】——动态系统仿真 之 混合系统
声明:本系列博客参考有关专业书籍,截图均为自己实操,仅供交流学习!
一、混合系统概述
由不同类型系统共同构成的系统称为混合系统!仿真时必须考虑连续信号和离散信号的采样匹配问题,一般使用变步长连续求…
【Simulink】基于FCS-MPC的带阻感负载的三相逆变器控制(Matlab Function)
之前写过三相并网逆变器FCS-MPC的博客 👉【Simulink】基于FCS-MPC的三相并网逆变器控制(Matlab Function) 应用的对象是并网的,用一个电压源(Three-Phase Programmable Voltage Source)模拟交流电网。 本篇…
AutoSAR-基于Matlab/Simulink的软件组件开发
AUTOSAR软件组件级设计与开发主要是针对应用层软件,需要先基于Matlab/Simulink进行应用层软件组件的模型建立,并配置生成符合AUTOSAR规范的代码及arxml描述文件,这是一种“自下而上”的工作流程。
基于Matlab/Simulink的软件组件开发主要就是…

Simulink仿真状态空间中状态反馈的一种方法
状态反馈
我们知道在多变量系统解耦的过程中需要将状态空间中的状态变量反馈回去从而达到解耦的目的。但是Simulink中的状态空间模块是没有这个功能的,因此我们可以采用搭建相同参数系统,然后让输出方程输出状态向量即可。 图中下面那个状态空间模型的…
simscape仿真总结2-机器人拖拽控制仿真实现
最近用simscape进行机器人的仿真,记录和总结一下学习心得和踩过的坑。 参照B站一位up主的视频做的仿真:
4自由度机械臂从Solidworks to Simscape 实现运动仿真
我也做了一个自己的简单小demo:
注意几点:
simscape的数据是物理信号&…
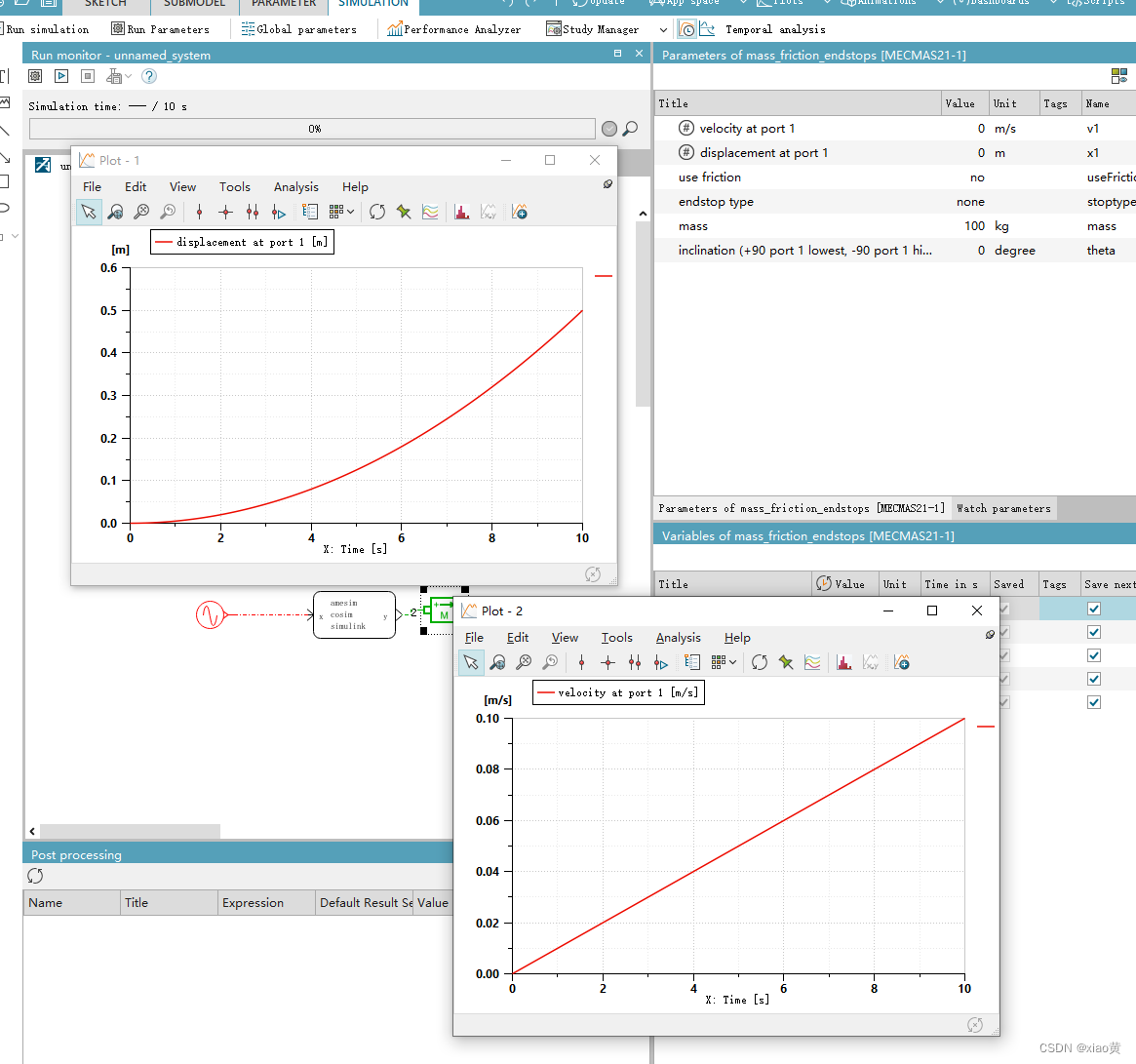
AMESim与MATLAB联合仿真demo
本文是AMESim与MATLAB联合仿真的demo,记录一下如何进行联合仿真。 AMESim与MATLAB联合仿真可以大幅度提高工作效率。
author:xiao黄
缓慢而坚定的生长
csdn:https://blog.csdn.net/Python_Matlab?typeblog主页传送门
博主的联合仿真环境如下ÿ…
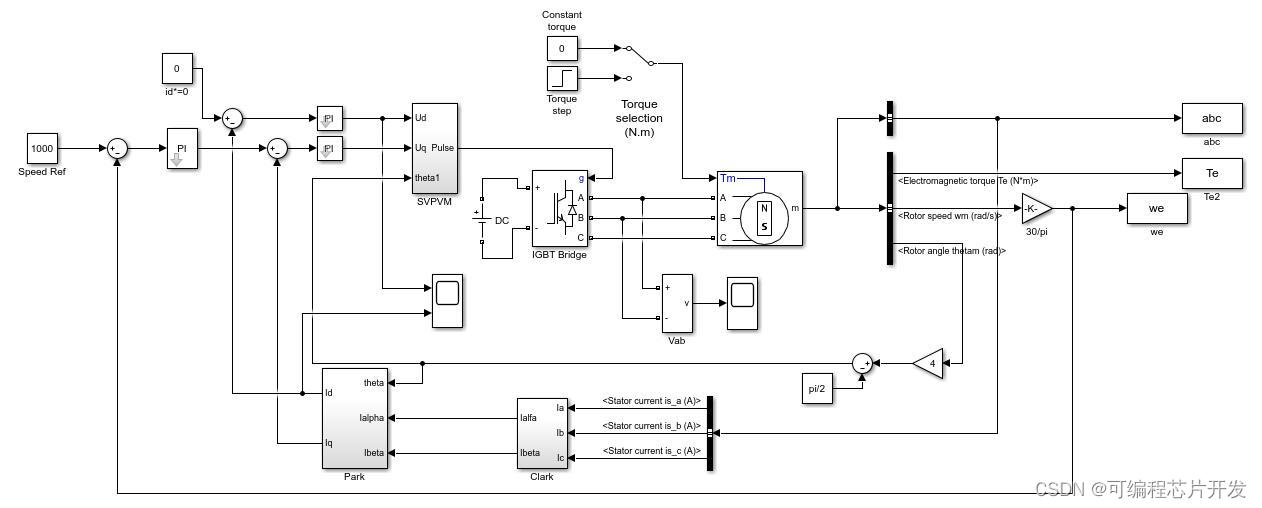
基于双闭环PI和SVPWM的PMSM控制器simulink建模与仿真
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
4.1 双闭环PI控制器设计
4.2 SVPWM技术
4.3 控制系统实现
5.完整工程文件 1.课题概述 基于双闭环PI和SVPWM的PMSM控制器simulink建模与仿真。系统包括逆变桥、PMSM、park变换、clark变换、SVPWM、PI控…
【电力电子在电力系统中的应用】2 Cuk电路
【仅供参考】
【2023.02西南交大电力电子在电力系统中的应用】 0 仿真要求 1.在MATLAB/Simulink中搭建Cuk仿真模型; 2.改变占空比D,使电路工作在降压和升压两种情况,分别分析电路工作在电感电流连续和断续两种情况下的波形; 3.波…

基于MATLAB/Simulink的三相并网逆变器dq阻抗建模及扫频仿真
目录 整体系统介绍理论模型MATLAB实现 基于Simulink的阻抗扫频仿真整体思路注意事项流程框图 其他 本文主要介绍三相并网逆变器dq阻抗建模的相关知识,和大家分享一下怎么使用MATLAB/Simulink来进行理论模型的搭建以及如何通过扫频获取阻抗模型,一方面是给…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机进入Offboard模式起飞悬停并在Gazebo中可视化
在Simulink中使用ROS2控制无人机进入Offboard模式起飞悬停并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现…
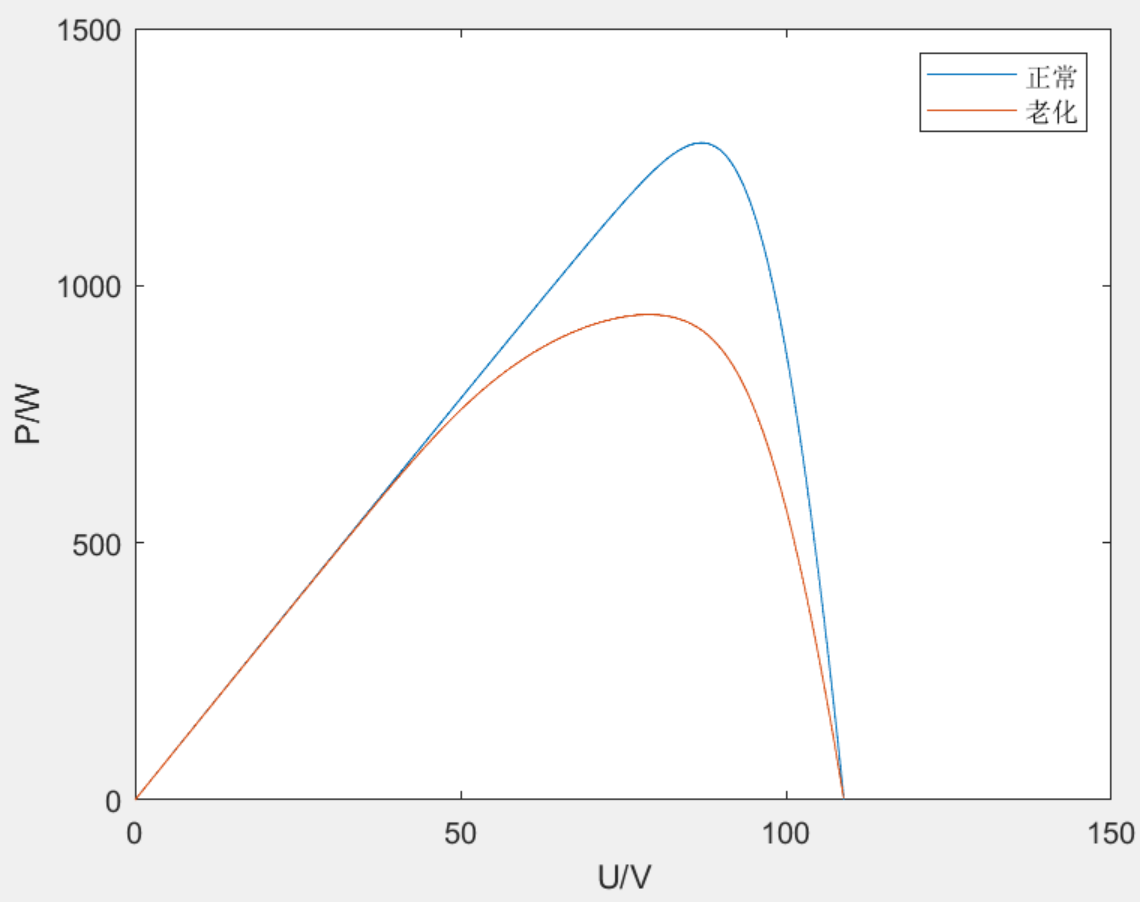
Simulink|光伏阵列模拟多类故障(开路/短路/阴影遮挡/老化)
目录 主要内容 模型研究
1.正常模型
2.断路故障
3.短路故障
4.阴影遮挡
5.老化模型 结果一览
1.U-I曲线
2.P-V曲线
下载链接 主要内容
该模型为光伏阵列模拟故障情况simulink模型,程序实现了多种故障方式下的光伏阵列输出功率-电压-电流关系特…
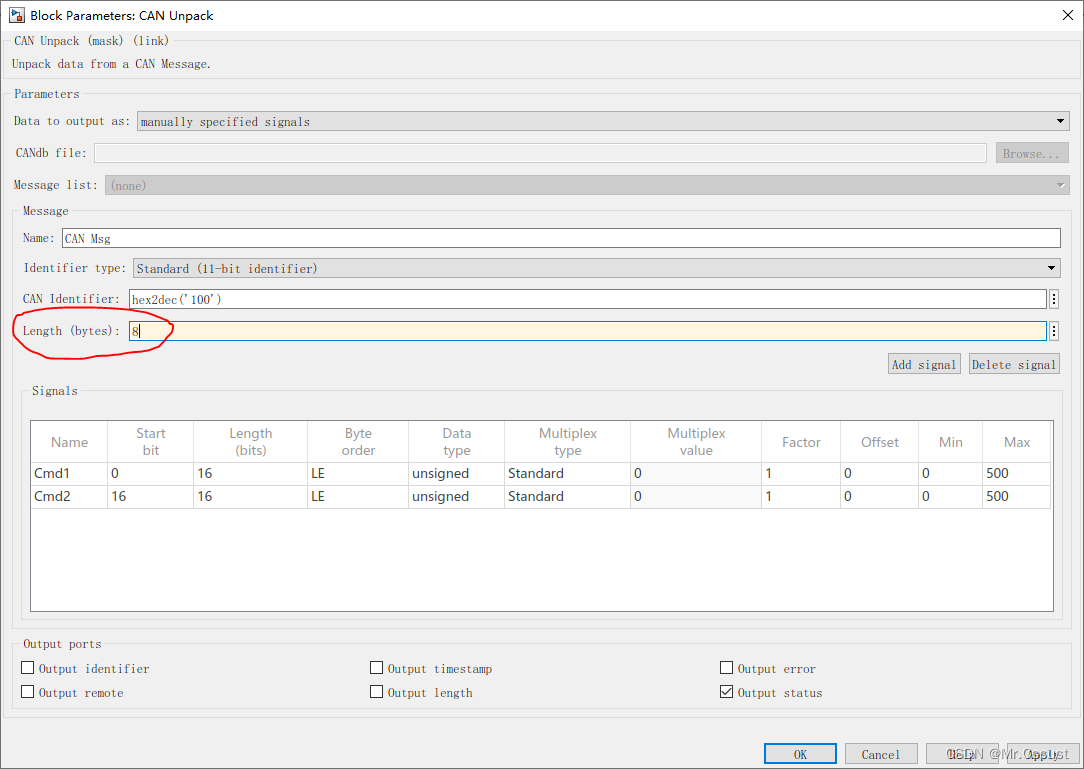
研发日记,Matlab/Simulink避坑指南(五)——CAN解包 DLC Bug
文章目录
前言
背景介绍
问题描述
分析排查
解决方案
总结 前言 见《研发日记,Matlab/Simulink避坑指南(一)——Data Store Memory模块执行时序Bug》 见《研发日记,Matlab/Simulink避坑指南(二)——非对称数据溢出Bug》 见《…
【MATLAB源码-第96期】基于simulink的光伏逆变器仿真,光伏,boost,逆变器(IGBT)。
操作环境:
MATLAB 2022a
1、算法描述
1. 光伏单元(PV Cell)
工作原理:光伏单元通过光电效应将太阳光转换为直流电。它们的输出取决于光照强度、单元温度和负载条件。Simulink建模:在Simulink中,光伏单元…
Simulink建模与仿真(3)-Simulink使用基础(Matlab内容)
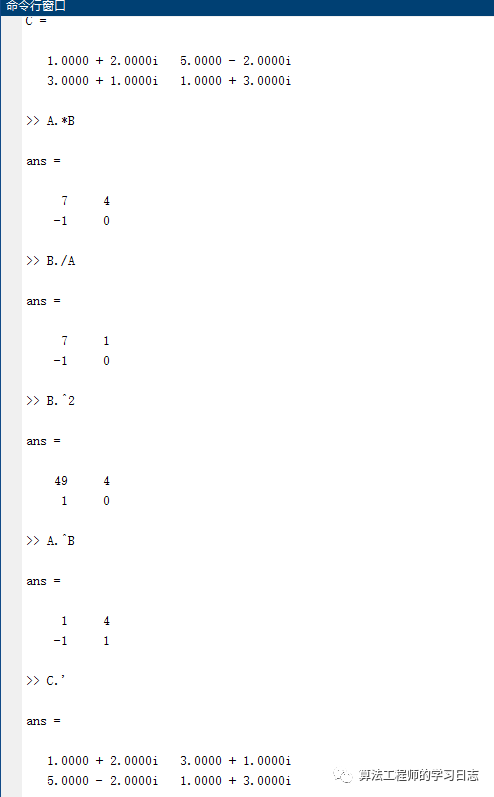
分享一个系列,关于Simulink建模与仿真,尽量整理成体系 1、MATLAB的计算单元:向量与矩阵
MATLAB作为一个高性能的科学计算平台,主要面向高级科学计算。MATLAB的基本计算单元是矩阵与向量,向量为矩阵的特例。一般而言&a…
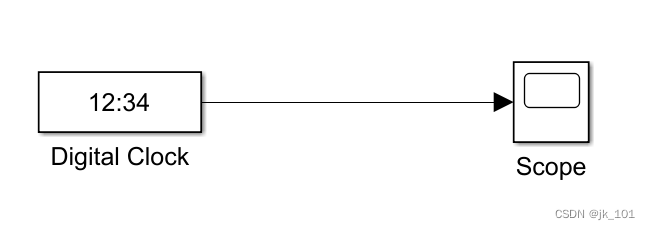
Simulink仿真模块 - Digital Clock
Digital Clock:以指定的采样间隔输出仿真时间 在仿真库中的位置为:Simulink / Sources 模型为: 说明 Digital Clock 模块仅以指定的采样间隔输出仿真时间。在其他时间,此模块保留输出的上一个值。要控制此模块的精度,请使用模块对话框中的 Sample time 参数。 当需要离散系…

对Simulink中scope进行进一步的设置
对Simulink中scope进行进一步的设置
首先运行MATLAB.m文件的初始化程序(如有的话)和Simulink模型,然后在命令窗口敲入以下两行代码(因为仿真中的scope都是默认设置,而且Simulink模型参数的初始化多是有专门的.m file&…
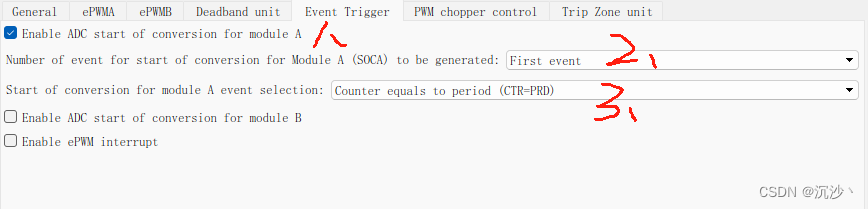
simulink代码生成(五)——ePWM模块初级应用
前面分别讲到了SCI及ADC的配置及使用,现在梳理一下ePWM的配置和使用;
先打一些基础的DSP28335的基础知识;
F28335 关于ePWM中断与SOC采样信号的一些思考_socasel-CSDN博客
F28335 ePWM模块简介——TMS320F28335学习笔记(四&…
simulink代码生成(五)——SCI接受模块;如何将串口发送的数据显示在matlab中
首先,实现DSP28335的自收自发;
添加串口收发模块; 设置参数,根据硬件选择串口模块: 配置中断触发;SCIB的接收中断的CPU中断号为9,PIE级中断为3; 因此如下配置; 代码生成…
【PID精讲12】基于MATLAB和Simulink的仿真教程
文章目录 写在前面一、基于Simulink的仿真1. 新建Simulink模型2. 保存Simulink模型3. 建模4. 运行二、基于MATLAB的仿真1. 编码2. 运行3. 调整曲线格式4. 导出图窗写在前面
第11讲介绍的连续系统的数字PID仿真是基于 Matlab的 M 语言实现的,对于初学者或者工程应用人员来说,…

matlab:Data type mismatch. Output port 1 of ‘xx‘ is a signal of data type ‘double‘. 问题解决
目录问题问题分析解决方案问题
在matlab的simulink下使用JK触发器模块时,出现问题:Data type mismatch. Output port 1 of ‘homework2/J-K Flip-Flop/J-K Flip-Flop/Mux’ is a signal of data type ‘double’. However, it is driving a signal of d…
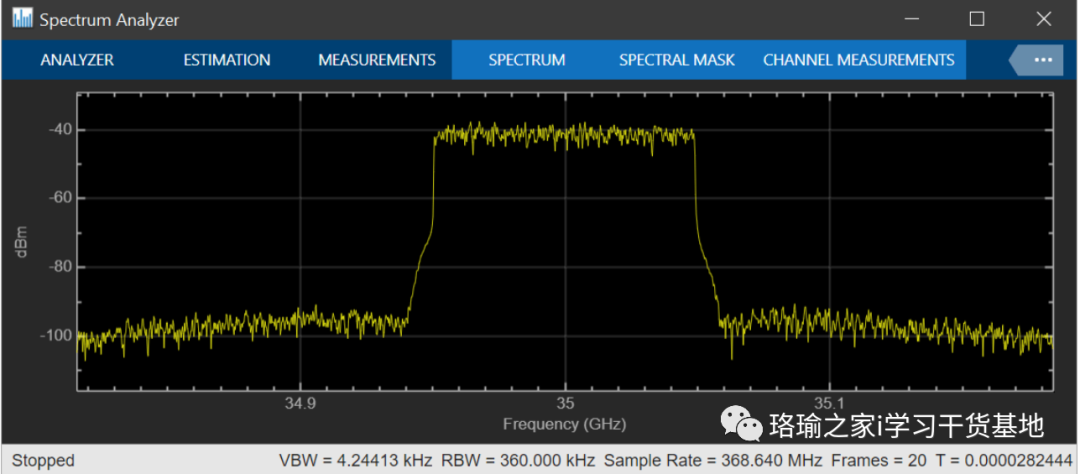
通过 Hilbert 变换实现单边带调制
目录
简介
双边带调制
单边带调制
理想的 Hilbert 变换
频谱移位器
SSB 调制的高效实现
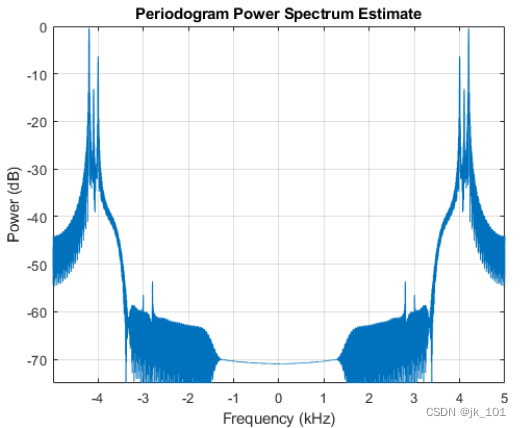
总结 该例子说明如何使用离散 Hilbert 变换来实现单边带调制。Hilbert 变换可应用于调制器和解调器、语音处理、医学成像、波达方向 (DOA) 测量,以及任何简化设计的复信…
【Simulink】极值搜索控制 Extremum Seeking Control(无模型控制)
1.什么是极值搜索控制?
首先明确一下,对于yf(x),f(a)是函数f(x)的极大值或极小值,则a为函数f(x)的极值点,极大值点与极小值点统称为极值点。
极值搜索,顾名思义,就是找到极小值点或者极大值点…
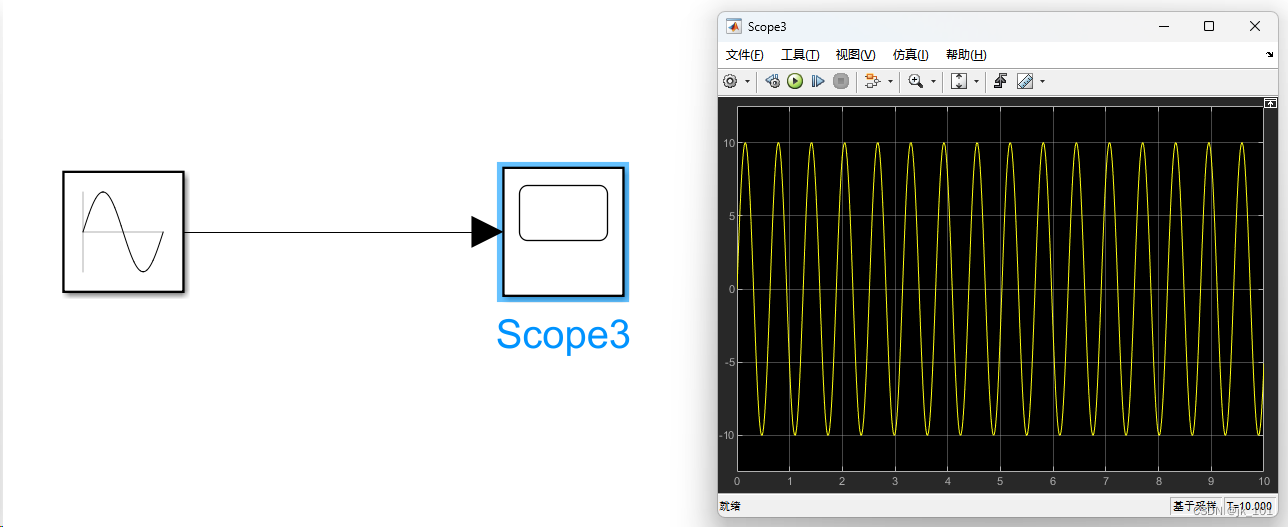
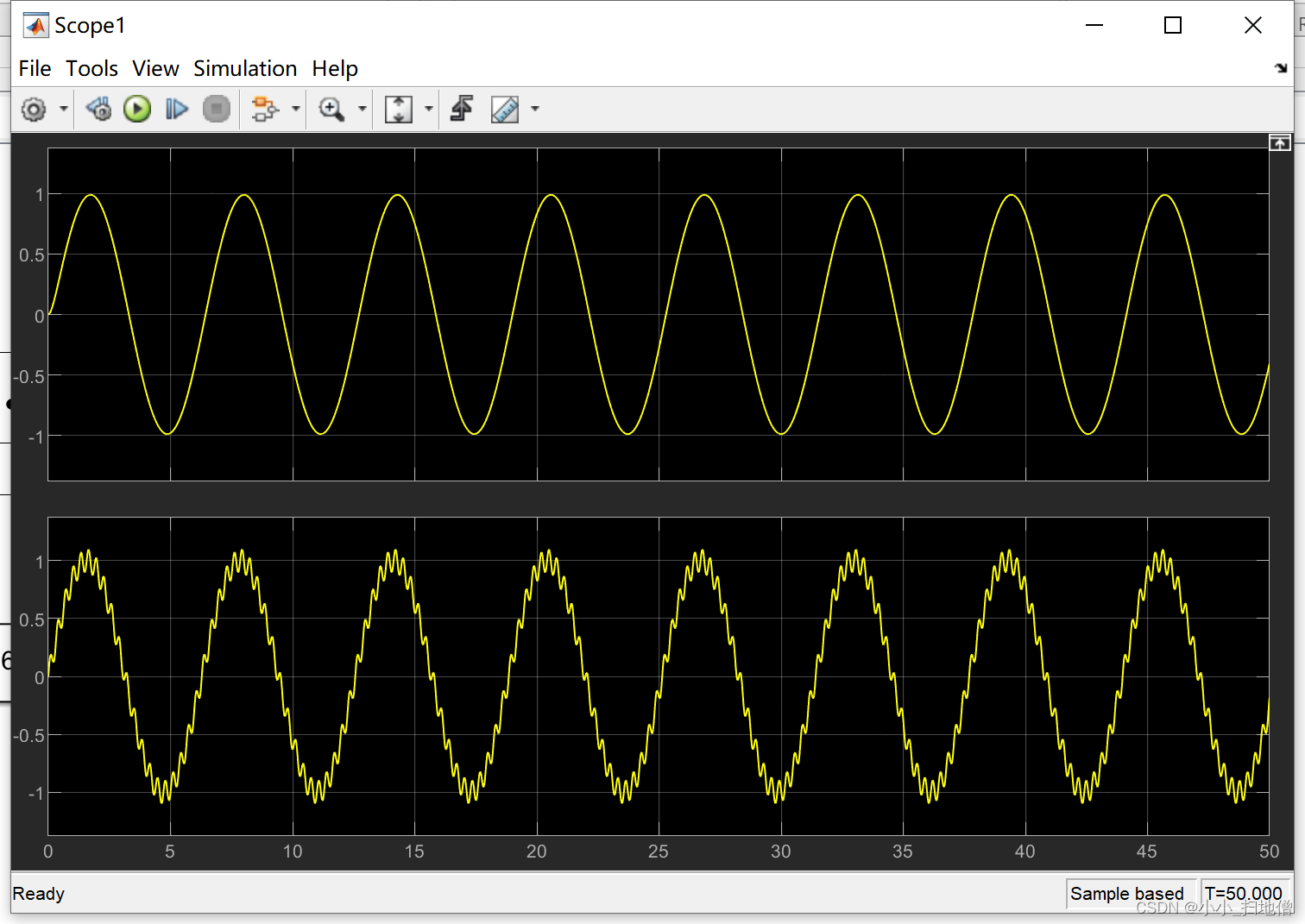
Simulink仿真中Sine Wave产生的正弦波形不规则,怎么解决
在使用simulink仿真时,使用Sine Wave模块产生的正弦波形不是正弦的,如下所示: 这个是由于simulink仿真中自动计算步长很长的原因导致的,此时需要将自动的步长更改,操作步骤如下所示:
1.点击设置按钮&#…
simulink代码生成(九)—— 串口显示数据(纸飞机联合调试)
纸飞机里面的协议是固定的,必须按照协议配置;
(1)使用EasyHEX协议,测试int16数据类型 测试串口发出的数据是否符合? 串口接收数据为: 打开纸飞机绘图侧:
(1)…
simucpp系列教程(7)坟墓
最近使用simucpp在做某预研航天项目中逐渐发现,simucpp没有明显优势,不如直接手撕ODE4,从代码量上来看两种方法其实差不多,而且simucpp更容易出现编程上的错误,比如空指针和参数配置等,而且运行速度肯定是直…
双向交错CCM图腾柱无桥单相PFC学习仿真与实现(2)SOGI_PLL学习仿真总结
目录 前言
SOGI基本原理
锁相环基本原理
仿真实现及说明
总结 前言
前面总结了双向交错CCM图腾柱无桥单相PFC系统实现,后面把问题细分,关于SOGI锁相环的应用和学习在这里总结下。
双向交错CCM图腾柱无桥单相PFC学习仿真与实现(1&#x…
Simulink|光伏并网逆变器低电压穿越仿真模型
目录 主要内容 模型研究
1.模型总览
2.boost模块
3.Inverter模块
4.控制模块
5.信号模块 结果一览
下载链接 主要内容
该模型为光伏逆变器低电压穿越仿真模型,采用boost加NPC拓扑结构,基于MATLAB/Simulink建模仿真。模型具备中点平衡…
【电力电子在电力系统中的应用】6 滞环电流控制的PWM整流器 + STATCOM整流器 + APF仿真
【仅供参考】
【2023.06西南交大电力电子在电力系统中的应用】 目录
步骤一:基于滞环电流控制的PWM整流器仿真
1.1 仿真要求
1.2 仿真电路原理及设计
1.2.1 主电路的搭建
1.2.2 控制电路的搭建
1.3 波形分析
步骤二:从PWM整流器到STATCOM仿真
2…
1_simulink简单入门_simulink仿真PID控制
1_simulink简单入门_simulink仿真PID控制 2_simulink搭建RCL_电阻电感电容模块 毕业前想去做物联网还是或者linux,结果玩了一年多的电机控制,早就深知matlab/simulink绕不过的,拖到现在,下班晚上再把大学自控做实验用的matlab捡起…
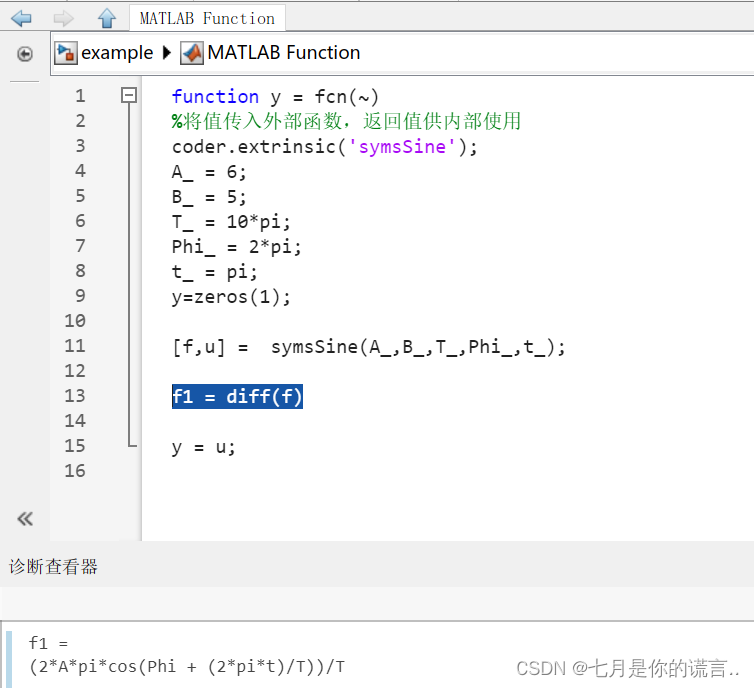
如何在Simulink中使用syms?换个思路解决报错:Function ‘syms‘ not supported for code generation.
问题描述
在Simulink中的User defined function使用syms函数,报错simulink无法使用外部函数。
具体来说:
我想在Predefined function定义如下符号函数作为输入信号,在后续模块传入函数参数赋值,以实现一次定义多次使用…
如何实现MATLAB与Simulink的数据交互
参考链接:如何实现MATLAB与Simulink的数据交互 MATLAB是一款强大的数学计算软件,Simulink则是一种基于模型的多域仿真平台,常用于工程和科学领域中的系统设计、控制设计和信号处理等方面。MATLAB和Simulink都是MathWorks公司的产品࿰…
相对全面的四足机器人驱动规划MATLAB和Simulink实现方式(足端摆线规划,Hopf-CPG,Kimura-CPG)
许久没更新四足机器人相关的博客文章,由于去年一整年都在干各种各样的~活,终于把硕士毕业论文给写好,才有点时间更新自己的所学和感悟。步态规划和足端规划只是为了在运动学层面获取四足机器人各关节的期望角位移和速度信号,再由底…
【轮式平衡机器人】——TMS320F28069片内外设之ePWM
声明:本系列博客参考有关专业书籍,截图均为自己实操,仅供交流学习!
引入
脉冲宽度调制(PWM)是一种对模拟信号进行数字编码的方法,硬件原理是根据相应载荷的变化来调制晶体管栅极或基极的偏置&…
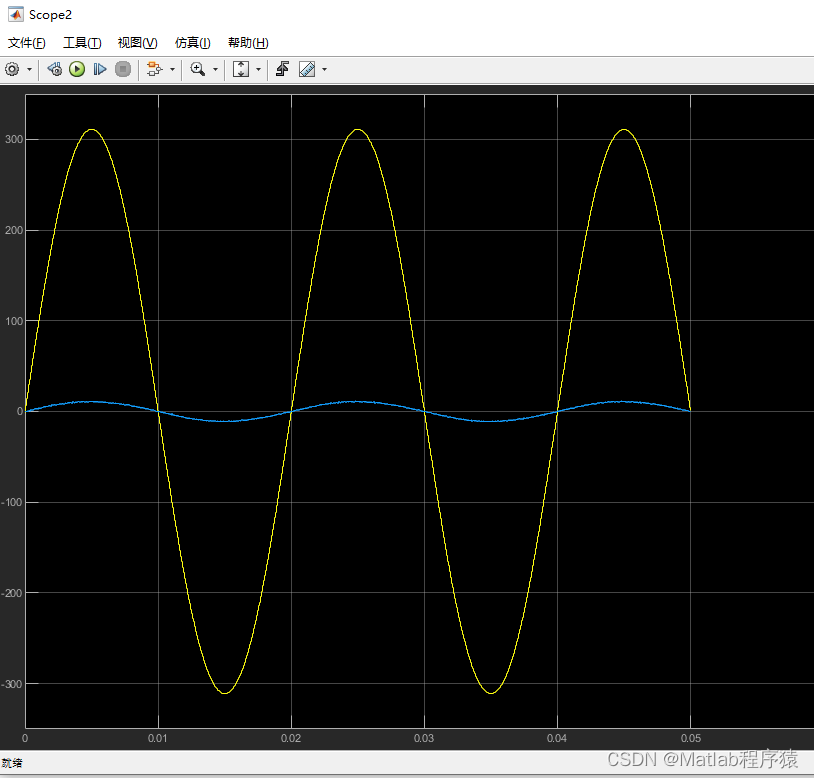
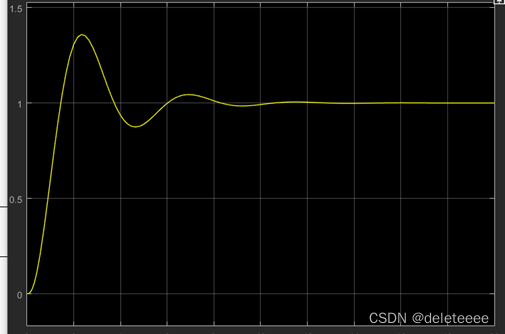
连续系统PID的Simulink仿真
大家好,我是带我去滑雪! 自从计算机进入控制领域以来,用数字计算机代替模拟计算机调节器组成的计算机控制系统,不仅可以用软件实现PID控制算法,而且可以利用计算机的逻辑功能,使PID控制变得更加灵活。数字P…
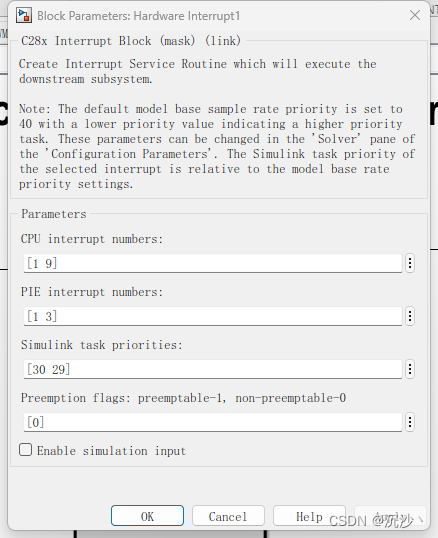
simulink代码生成(六)——多级中断的配置
假如系统中存在多个中断,需要合理的配置中断的优先级与中断向量表;在代码生成中,要与中断向量表对应;中断相关的知识参照博客:
DSP28335学习——中断向量表的初始化_中断向量表什么时候初始化-CSDN博客
F28335中断系…
![[现代控制理论]8_LQR控制器_simulink](https://img-blog.csdnimg.cn/6bbb4ef49fd840f897d75dbc32c5f869.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA546L5bSH5Y2r,size_20,color_FFFFFF,t_70,g_se,x_16)
[现代控制理论]8_LQR控制器_simulink
[现代控制理论]11_现代控制理论串讲_完结_pdf获取 [现代控制理论]10_可观测性与分离原理_观测器与控制器 [现代控制理论]9_状态观测器设计_龙伯格观测器 [现代控制理论]8.5_线性控制器设计_轨迹跟踪simulink [现代控制理论]8_LQR控制器_simulink [现代控制理论]7_线性控制器设计…

MATLAB Simulink模块库详解(二)Sinks篇
MATLAB Simulink模块库详解(二)Sinks篇
Simulink模块库概述
1.Sources模块库,为仿真提供各种信号源
2.Sinks模块库,为仿真提供输出设备元件
3.Continuous模块库,为仿真提供连续系统
4.Discrete模块库,…
Carsim与Simulink联合仿真
CarSim与Simulink联合仿真
1.横向控制/轨迹跟随/车道保持 PID控制算法(较为简单,仅适合入门学习联合仿真,包含模型说明文档) 模糊PID控制算法(新手级,适合初步深入学习联合仿真) 预瞄Stanley…

MATLAB/Simulink在控制系统仿真与CAD应用(三)
MATLAB控制系统仿真MATLAB控制系统分析工具箱系统辨识工具箱流程导入数据到MATLAB工作空间在工具箱中导入数据导入模型点击Estimate开始系统辨识结果验证其他功能模型导出Else注意PID Tuner流程在MATLAB工作空间输入被控对象模型导入模型PID Tuner自动设计并给出控制效果其他功…
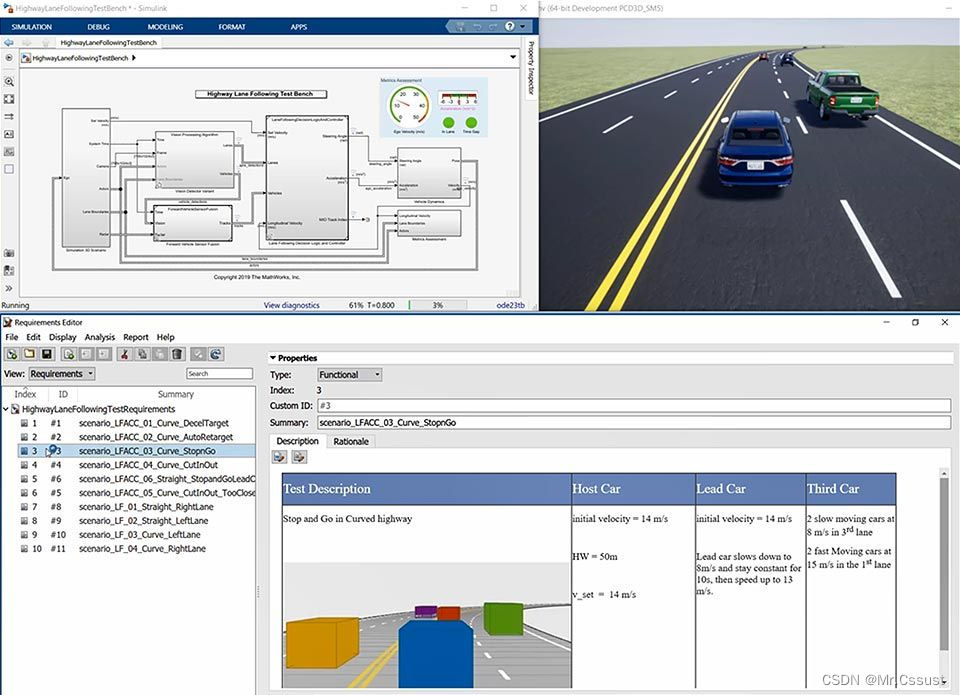
基于Matlab/Simulink开发自动驾驶的解决方案
文章目录
处理自动驾驶数据
仿真自动驾驶场景
设计感知算法
设计规划和控制算法
生成代码和部署算法
集成和测试
参考文献 使用 MATLAB/Simulink开发自动驾驶,能够深入建模真实世界的行为、减少车辆测试并验证嵌入式软件的功能,从而推进自动驾驶感…

基于MPPT的风力机发电系统simulink建模与仿真
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
4.1风能与风力发电机模型
4.2风力机功率特性与最大功率点
4.3 MPPT
5.完整工程文件 1.课题概述 基于MPPT的风力机发电系统simulink建模与仿真。MPPT使用S函数编写实现。基于最大功率点跟踪(…
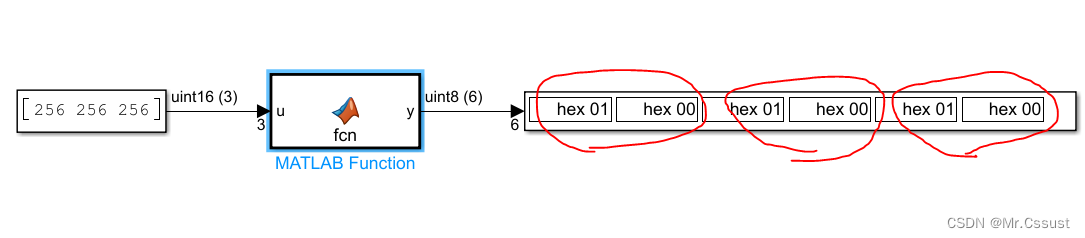
研发日记,Matlab/Simulink避坑指南(六)——字节分割Bug
文章目录
前言
背景介绍
问题描述
分析排查
解决方案
总结归纳 前言 见《研发日记,Matlab/Simulink避坑指南(一)——Data Store Memory模块执行时序Bug》 见《研发日记,Matlab/Simulink避坑指南(二)——非对称数据溢出Bug》…
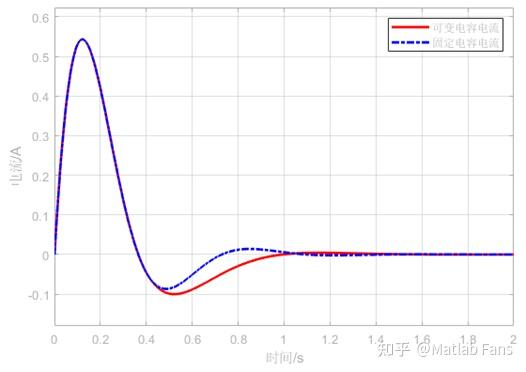
如何在Simulink中使用可变电阻-可变电容-可变电感
1. 原由 前期文章提出了Simulink如何在线修改(动态修改)模块参数的方法,并提供原创的Dynamic Change Parameter模块(简称DCP模块),模块得到了许多朋友的使用。最近收到几位朋友反馈,他们使用DCP…
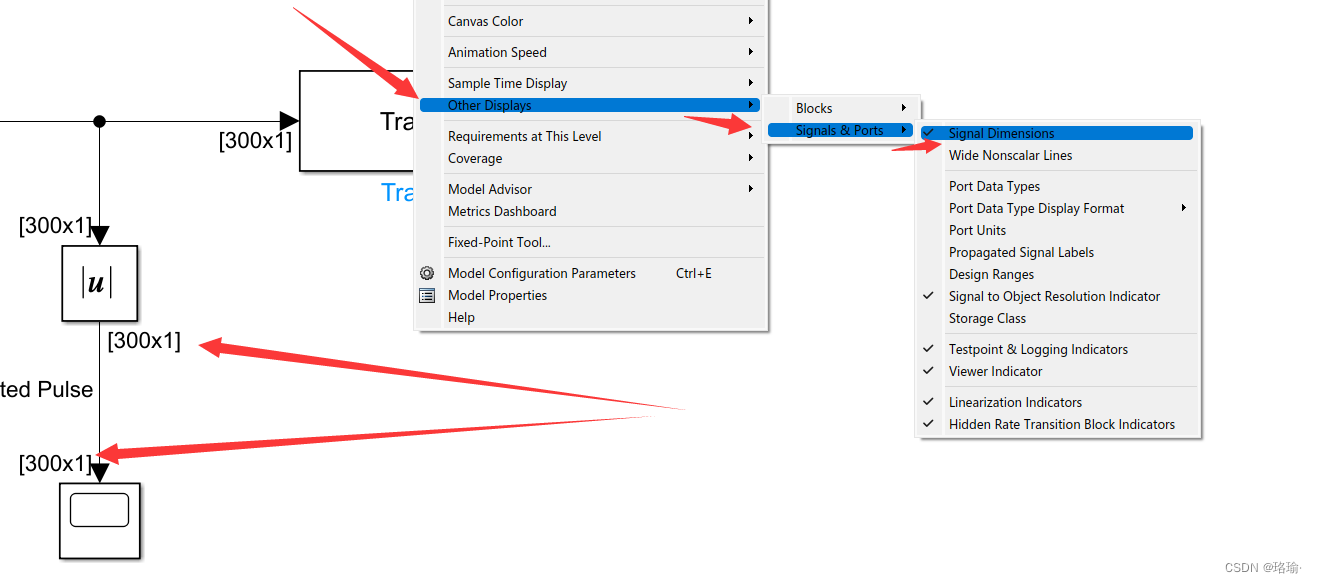
Simulink之显示信号维度
一、目的
在Simulink仿真时,将每根信号线上的信号维度显示出来,以便于我们分析信号的处理过程和接口数据的大小。
二、操作方法
2.1 老版本Matlab
对于老版本Matlab,如下图所示,依次点击Display->Signal&Ports->Sig…

基于simulink的超级电容,电池及DC motor充放电系统仿真
目录
一、理论基础
二、核心程序
三、测试结果 作者ID :fpga和matlab
CSDN主页:https://blog.csdn.net/ccsss22?typeblog
擅长技术:
1.无线基带,无线图传,编解码
2.机器视觉,图像处理,三维重建
3.人工智能,深度学习
4.智能控制,智能优…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义圆形轨迹飞行并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模型并完成基本配置整体框架各子系统实现原理…
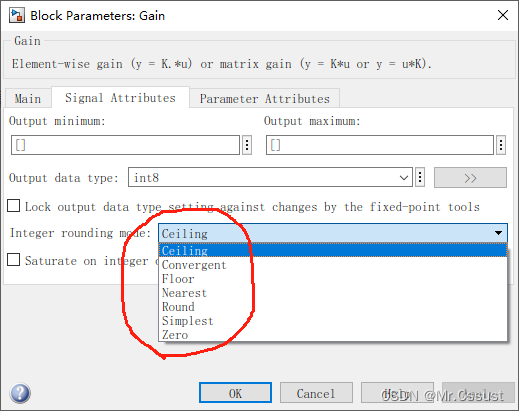
研发日记,Matlab/Simulink避坑指南(三)——向上取整Bug
文章目录
前言
背景
问题
排查
解决
总结 前言 见《研发日记,Matlab/Simulink避坑指南(一)——Data Store Memory模块执行时序Bug》 见《研发日记,Matlab/Simulink避坑指南(二)——非对称数据溢出Bug》 背景 在一个嵌入式软…

抗积分饱和 PID代码实现,matlab仿真实现
抗饱和PID
前几天开始我就计划把c电机仿真的PI控制器代码优化一下的时候,群里刚好讨论了Microchip的AN1078文档中的PI框图: 在这里插入图片描述
找了点视频和文章,大家感兴趣可以去看看,相信你会收获更多。 TI的公开培训 &…
Simulink 自动代码生成:手写代码替换生成代码Code Replacement Tool使用
目录 前言
代码替换库操作步骤
代码生成验证
总结 前言
在实际工程开发过程中,Simulink生成的代码都是构建的算法实现的,纯软件实现,生成的代码大多也是直接在CPU上运行的。实际还有一些MCU集成了像Cordic,协处理器等。有些代…
研发日记,MatlabSimulink开箱报告(九)——Simulink Test模块
文章目录
前言
Simulink Test模块
静态测试
动态测试
逻辑测试 前言 见《开箱报告,Simulink Toolbox库模块使用指南(四)——S-Fuction模块》 见《开箱报告,Simulink Toolbox库模块使用指南(五)——S-F…
研发日记,Matlab/Simulink避坑指南(七)——数据溢出钳位Bug
文章目录
前言
背景介绍
问题描述
分析排查
解决方案
总结归纳 前言 见《研发日记,Matlab/Simulink避坑指南(二)——非对称数据溢出Bug》 见《研发日记,Matlab/Simulink避坑指南(三)——向上取整Bug》 见《研发日记,Matlab/Simulink避坑…
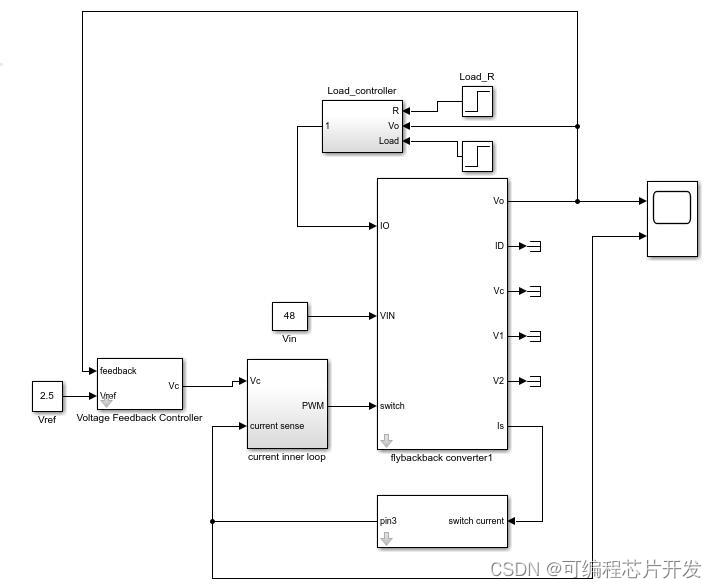
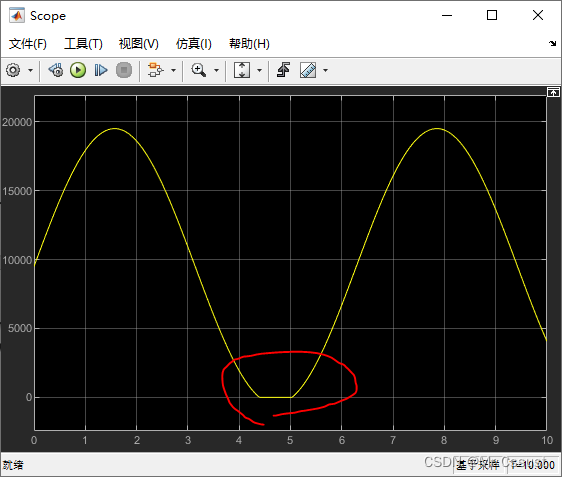
基于simiulink的flyback反激型电路建模与仿真
目录
1.课题概述
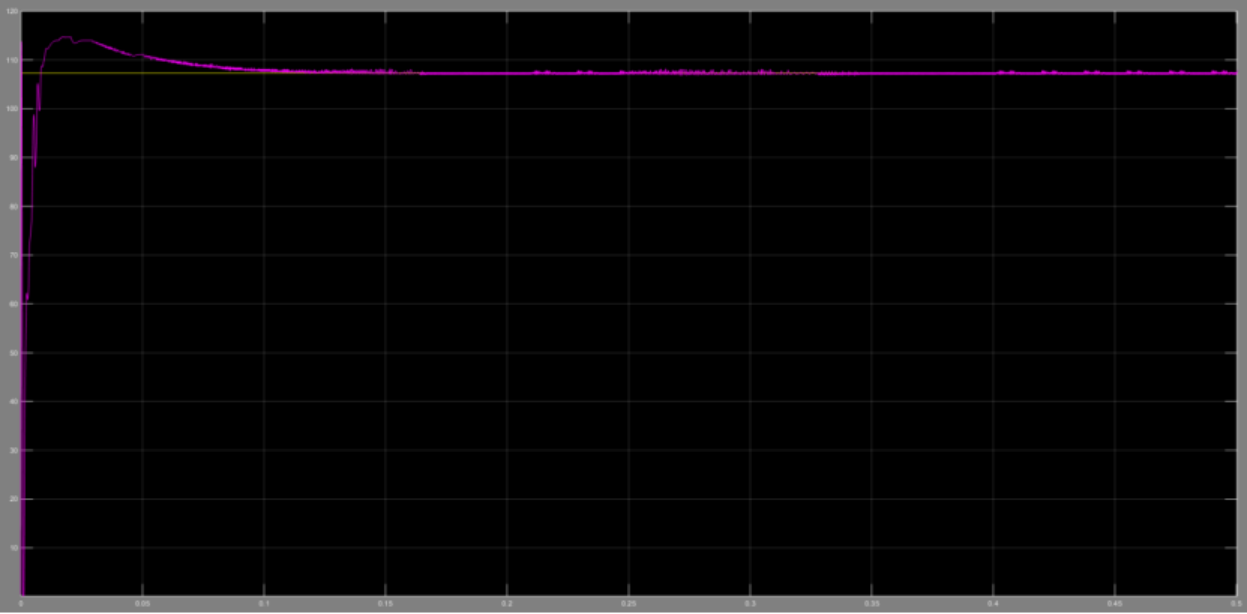
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
4.1 Flyback反激型电路的基本原理
4.2 Flyback反激型电路的数学建模
4.3 Flyback反激型电路的仿真方法
5.完整工程文件 1.课题概述 flyback反激型电路建模与仿真。反激变换器在开关管导通时电源将电能…
【轮式平衡机器人】——TMS320F28069片内外设之eCAP
引入
TMS320F28069的eCAP(增强型捕获模块)是一个强大的外设,用于精确测量和捕获输入信号的事件和时间戳。
在电机控制、传感器数据采集和信号处理等应用中,eCAP模块可以用于测量霍尔传感器、编码器或其他数字输入信号的周期、频…
Simulink|局部遮荫下光伏组件多峰值PSO-MPPT控制
目录 主要内容
1.光伏电池工程数学模型的输出特性程序
2.普通扰动观察法进行MPPT
3.基于粒子群寻优的多峰输出特性
4.PSO_MPPT仿真模型
程序下载链接 主要内容
在实际的光伏发电系统中,由于环境多变等因素的影响,当局部出现被遮挡情况时光伏阵列的功率-电压(P-U)特…
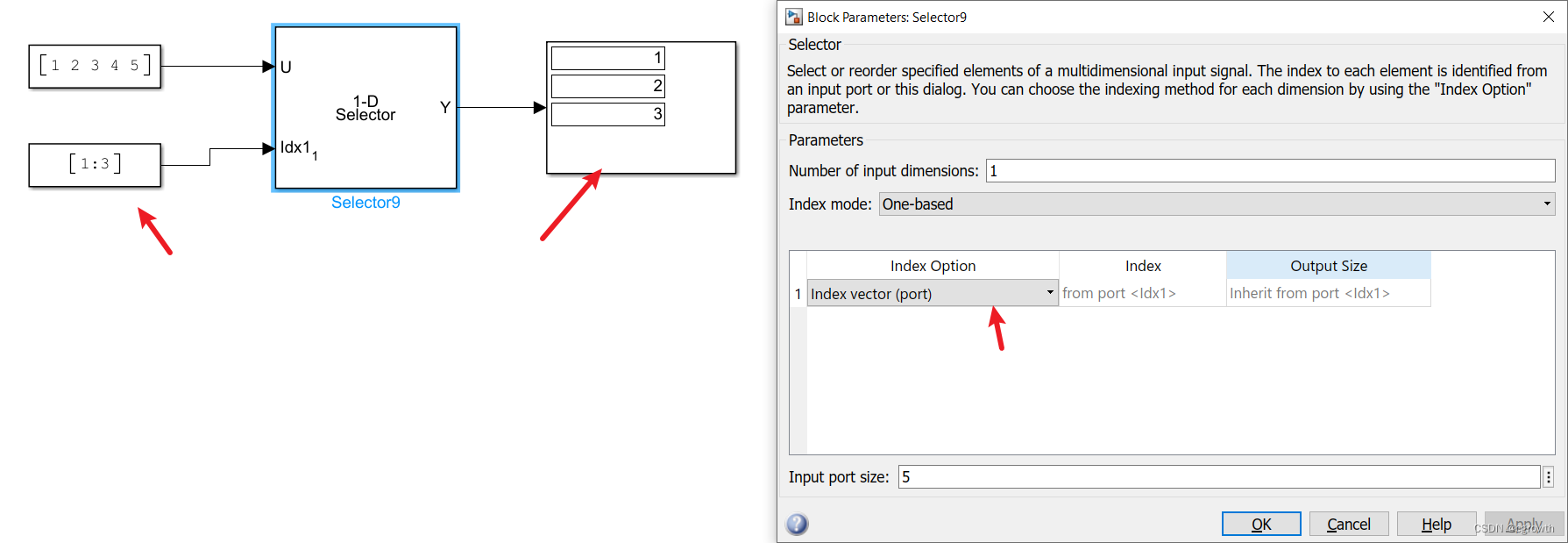
Simulink中Selector的使用
文章目录 0.prolog1 Starting and ending indices (port)2. Starting index (port)3. Starting index (dialog)4. Index vector (dialog)5. Index vector (port)Reference 0.prolog
Index mode有两种,[one-based, zero-based],分别是从1开始计数&#x…
simulink代码生成(六)——中断向量模块的配置
假如系统中存在多个中断,需要合理的配置中断的优先级与中断向量表;在代码生成中,要与中断向量表对应;中断相关的知识参照博客:
DSP28335学习——中断向量表的初始化_中断向量表什么时候初始化-CSDN博客
F28335中断系…
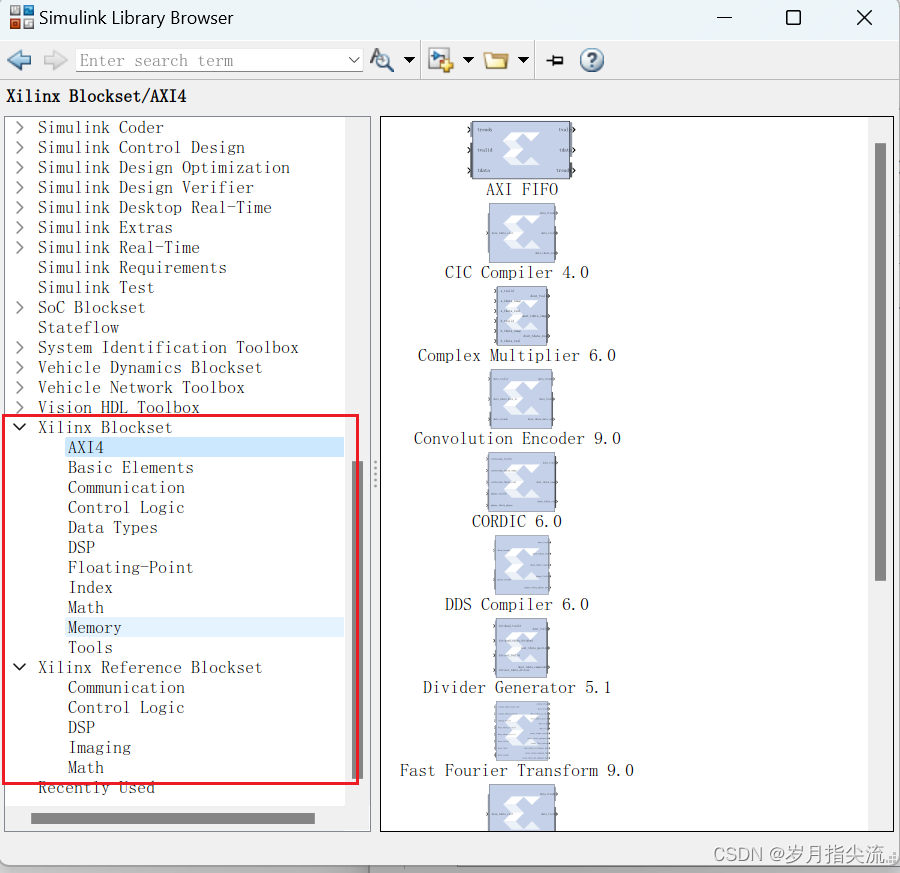
System Generator初体验FIR滤波器
文章目录 前言一、介绍1、目标2、过程 二、步骤 1:在 FPGA 中创建设计1、打开 Lab1_1.slx 文件2、运行仿真3、使用 System Generator 创建 FIR 滤波器<1>、从库浏览器寻找需要的模块<2>、配置系统生成器块<3>、在 FPGA 上实现设计 三、步骤 2&…
A2L文件的自动生成(Simulink/CANape)
目录
什么是A2L文件?
使用simulink生成A2L文件
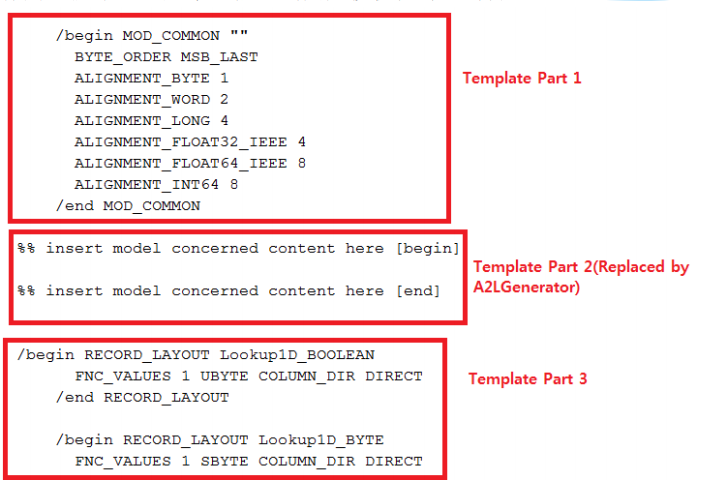
A2L文件组成
characteristic
measurement
compu_method
group
simulink生成的A2L与CANape生成的A2L
如何自动修改simulink生成A2L文件使其适用于CANape?
所需文件 什么是A2L文件?
A2…
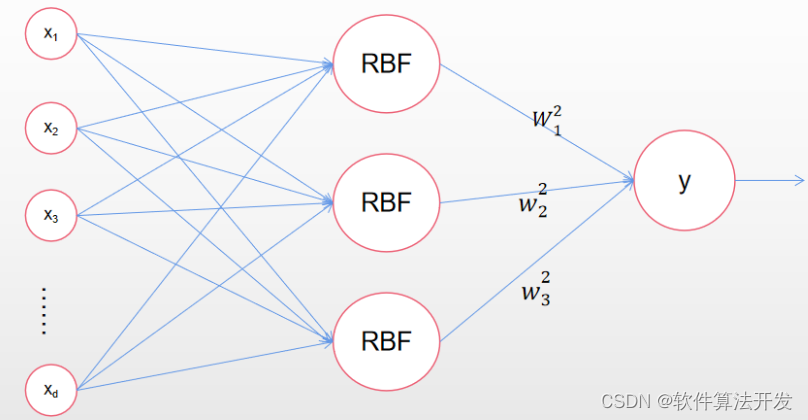
基于RBF神经网络的自适应控制器simulink建模与仿真
目录
1.程序功能描述
2.测试软件版本以及运行结果展示
3.核心程序
4.本算法原理
4.1自适应控制器
4.2 RBF神经网络模型
5.完整程序 1.程序功能描述 在simulink中,使用S函数编写基于RBF神经网络的自适应控制器,然后实现基于RBF神经网络的自适应控制…

simulink电力系统仿真(1):电力系统库+(电力系统基础知识)
文章目录 基础知识仿真库搭建一个简单的电路 基础知识
★三相交流电:三相电是三组幅值相等、频率相等、相位互相差120的交流电,由有三个绕组的三相发电机产生,是工业上常用的电源,可提供超过数千瓦或以上功率的电力。★电力系统暂…
Simulink 自动代码生成电机控制:方波高频注入仿真到代码生成开发板演示
目录 前言
方波高频注入仿真
生成代码开发板运行
总结 前言
最近换了一个小电机,于是尝试了一下方波高频注入的仿真到代码生成的实验,正弦波注入的方式已经实现
STM32 Simulink 自动代码生成电机控制——脉振高频注入_高频注入代码_卡洛斯伊的博客-…
simulink simscape驱动方式总结
驱动方式分类
贴出官方文档的一张图:
其中这两个是最常用的: 求解机器人正运动学使用的是(求解逆动力学,给输入角度,力矩自动计算): 而如果给定力和力矩,计算机器人的运动姿态,就是正动力学 …

Simulink仿真模块 - Clock
Clock:显示并提供仿真时间
库: Simulink / Sources
模型为: 说明 Clock 模块在每个仿真时间步输出当前仿真时间。此模块对需要仿真时间的其他模块非常有用。 当在离散系统中需要当前时间时,请使用Digital Clock模块。 实例 模块…
AutoSAR软件组件开发的两类工作流程(Matlab/Simulink)
目录
前面
自顶向下
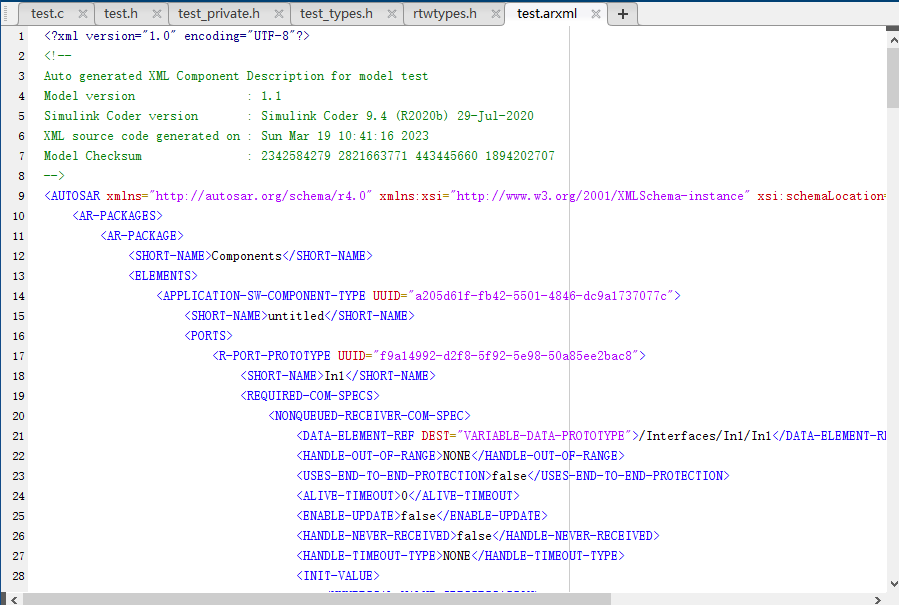
导入arxml文件
生成模型框架
搭建算法模型
生成代码
自下向上 前面
如何在Matlab进行AutoSAR软件组件SWC的开发?也就是下图红框标识出来的部分。 常规的有两种方式自顶向下与自下而上:
从上往下:从软件组件描述文…
基于simulink使用射频模块集天线块对天线阵列的射频系统进行建模
一、前言 本 例 说明 如何 对 包括 天线 阵列 的 MIMO 接收 和 发射 RF 系统 进行 建模。该设计从单个RF链的预算分析开始,然后扩展到多个天线。RF Blockset 天线模块对天线阵列进行全波分析,支持对效应和缺陷进行高保真建模,并结合射频系统的…

【PX4SimulinkGazebo联合仿真】在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化
在Simulink中使用ROS2控制无人机沿自定义8字形轨迹正向飞行(带偏航角控制)并在Gazebo中可视化 系统架构Matlab官方例程Control a Simulated UAV Using ROS 2 and PX4 Bridge运行所需的环境配置PX4&Simulink&Gazebo联合仿真实现方法建立Simulink模…
Simulink建模与仿真(3)-Simulink 简介
分享一个系列,关于Simulink建模与仿真,尽量整理成体系 1、Simulink特点
Simulink是一个用来对动态系统进行建模、仿真和分析的软件包。使用Simulink来建模、分析和仿真各种动态系统(包括连续系统、离散系统和混合系统),将是一件非常轻松的事…
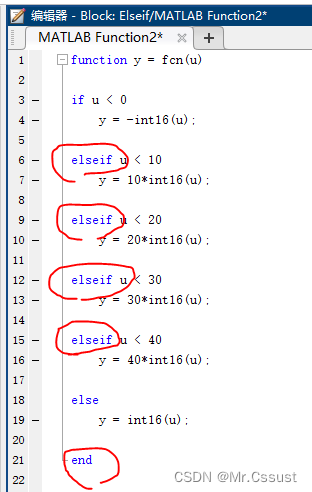
研发日记,Matlab/Simulink避坑指南(八)——else if分支结构Bug
文章目录
前言
背景介绍
问题描述
分析排查
解决方案
总结归纳 前言 见《研发日记,Matlab/Simulink避坑指南(三)——向上取整Bug》 见《研发日记,Matlab/Simulink避坑指南(四)——transpose()转置函数Bug》 见《研发日记,Matlab/Simuli…
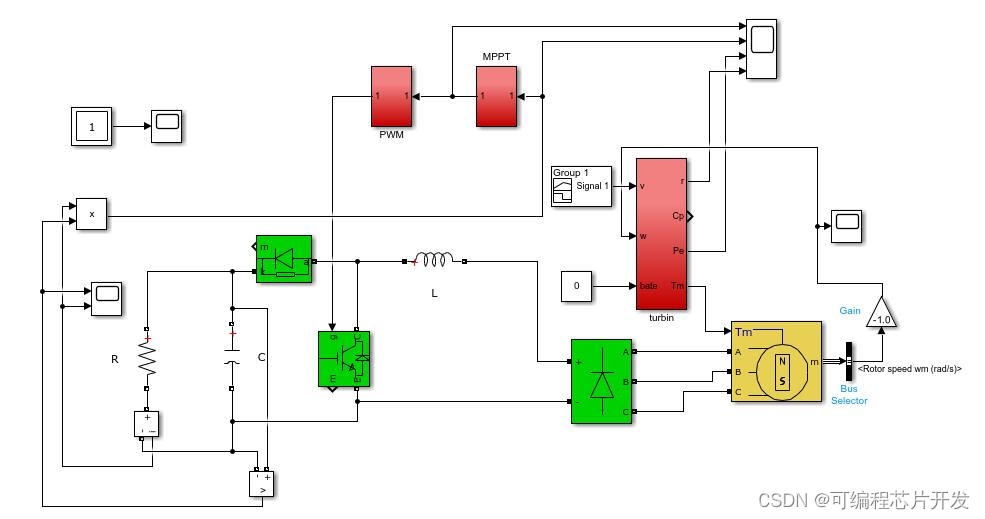
基于MPPT最大功率跟踪算法的涡轮机控制系统simulink建模与仿真
目录
1.课题概述
2.系统仿真结果
3.核心程序与模型
4.系统原理简介
5.完整工程文件 1.课题概述 基于MPPT最大功率跟踪算法的涡轮机控制系统simulink建模与仿真.mppt采用爬山法实现,仿真输出MPPT控制效果,功率,转速等。
2.系统仿真结果 …
小师兄1995个人博客总目录
文章目录前言一、直流有刷电机系列文章二、直流无刷电机系列文章三、MBD系列文章四、硕士期间系列文章总结前言
该博客作用于记录自己的学习过程,不定时更新。博主毕业于控制科学与工程专业,硕士期间接触实验室电力电子、电机控制以及电网等相关项目&am…
基于Simulink的Chaos混沌电路设计与仿真
目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本
matlab2022a
3.部分核心程序 07_001m
4.算法理论概述 混沌电路是一类特殊的非线性电路,其输出信号表现出无规律…
【Simulink】单相电压型全桥逆变电路仿真基础实验
版本:matlab2019b
1 单相电压型全桥逆变电路简介 1.1 逆变
逆变,即直流变换成交流。 在全桥逆变电路中:V1、V2、V3、V4 为 IGBT,VD1、VD2、VD3、VD4为二极管 当V1、V4导通,V2、V3截止时,负载电压uo为正&a…

使用simulink做图像裁剪时由于矩阵大小可变导致出现的错误及其解决方法
报错及问题描述
报错部分设置及描述 在本例中,find bounding box 模块会得到四个变量r1, r2, c1, c2,img_crop 则根据这四个变量对图像进行裁剪。img_crop 中裁剪代码如下:
function img_cropped img_crop(img, r1, r2, c1, c2)img_croppe…

动作捕捉系统通过SDK与MATLAB/Simulink通信
NOKOV度量动作捕捉系统支持通过SDK与MATLAB/Simulink通信,将动作数据传入MATLAB/Simulink进行实时解算。
一、形影软件设置
1、在形影软件中加载数据 2、选择网卡地址 3、勾选“使用SDK” 4、点击播放按钮。这时候SDK的数据就已经向外发送了
二、MATLAB接收数据…

simulink代码生成(一)——环境搭建
一、安装C2000的嵌入式环境;
点击matlab附加功能,
然后搜索C2000,安装嵌入式硬件支持包;点击安装即可;(目前还不知道破解版的怎么操作,目前我用的是正版的这样,完全破解的可能操作…
Simulink各求解器的特点
对于用数值方法求解常系数微分方程(Ordinary Differential Equation,ODE)或微分方程组,Simulink提供了七种求解函数(的方法)。
Ode45。这种求解器采用龙格一库塔方法,这也是利用Simulink求解微分方程时最常用的一种方法。这种算法…
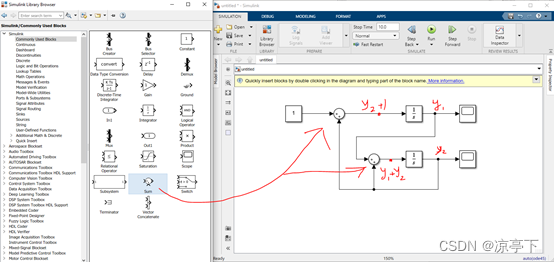
学习记录《Simulink 快速入门 —— 官方Help文档》
Simulink 快速入门 —— 官方Help文档1. Simulink 模块图2 创建简单模型2.1 打开新模型2.2 打开 Simulink库浏览器2.2.1将模块添加到模型2.2.2 连接模块2.2.3 添加信号查看器2.2.4 运行仿真2.2.5 细化模型1. 更改模块参数2. 添加新模块和连接3. 为信号添加注释4. 比较多个信号3…
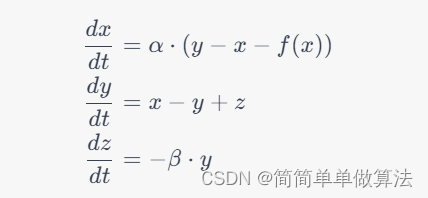
matlab+Simulink实现微分方程求解及子系统封装
1.内容
(一)、Lorenz模型的状态方程表示为: 初值为
要求:
1.建立脚本,采用四阶五级的(Runge-Kutta-Felhberg, RKF)方法,调用ode45()方法求解该方程;
2.在Simulink下完成下列要求:…
Matlab Simulink支持system generator插件
文章目录 前言一、System Generator 简介二、System Generator 特性三、System Generator 安装1、确定是否已安装 System Generator 工具2、vivado 卸载3、vivado 安装 四、解决版本不兼容问题五、使用 System Generator 前言
目前有在 Simulink 中开发完成后将其转换成 Veril…

基于DDSRF正负序分离方法的不平衡电网PQ控制策略_平衡电流控制
0.前言 对于并网逆变器而言,电网会存在不平衡的情况。在这种情况下,不平衡的电网电压可以分解成为正序、负序和零序分量。并网逆变器通常期望能够实现单位功率因数并网,向电网注入对称的正弦电流,所以此时的微电网逆变器控制策略显…
Simulink 最基础教程(一)
1.1基本概念
一个典型的Simulink模型大致如上图这样:
1)模块 block:图中画圈的那些,每个模块可以完成一些特定的任务,类似MATLAB中函数的概念。软件提供了很多模块,当然也可以自定义新的模块
2࿰…
电路设计中的7个常用接口类型你会用了吗
我们知道,在电路系统的各个子模块进行数据交换时可能会存在一些问题导致信号无法正常、高质量地“流通”,例如有时电路子模块各自的工作时序有偏差(如CPU与外设)或者各自的信号类型不一致(如传感器检测光信号)等,这时我们应该考虑通过相应的接…
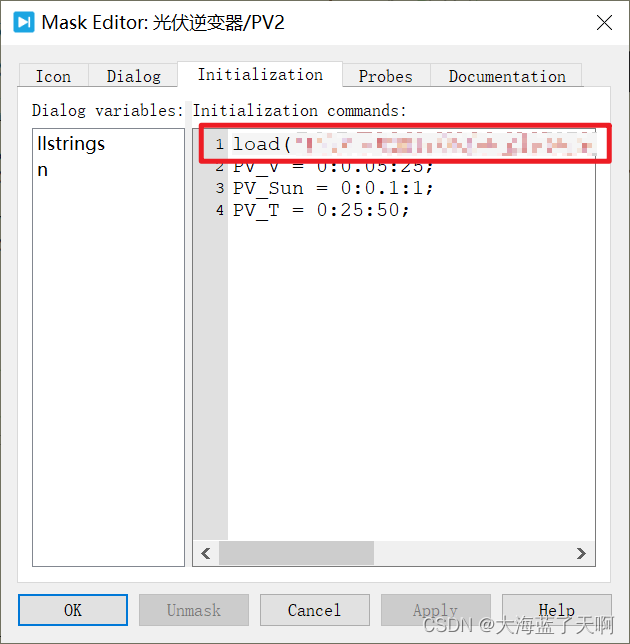
如何将simulink中的元件(光伏板)导入到plecs中使用
simulink中有一些元件在plecs中是没有的,如果想要直接使用simulink的库,可以这样操作:
1
新建mdl文件(simulink的文件类型),并在该文件中搭建好想要的模型、元件(只放想要导出的元件就可以了&…

研发日记,Matlab/Simulink避坑指南(九)——可变数组应用Bug
文章目录
前言
背景介绍
问题描述
分析排查
解决方案
总结归纳 前言 见《研发日记,Matlab/Simulink避坑指南(四)——transpose()转置函数Bug》 见《研发日记,Matlab/Simulink避坑指南(五)——CAN解包 DLC Bug》 见《研发日记,Matlab/Si…
多段曲线控温从Simulink仿真到PLC控制实现
多段曲线温度控制,专栏有系列文章和完整源代码,大家可以自行搜索。链接如下:
博途PLC 1200/1500PLC多段曲线控温FB(支持40段控温曲线、段曲线搜索、暂停、跳段等功能)_RXXW_Dor的博客-CSDN博客多段控温曲线之前专栏的其它文章也有所讲解,大家可以参看下面这篇专栏博途1200…
simulink代码生成
文章目录 simulink代码生成simulink生成嵌入式C代码simulink生成AUTOSAR代码 simulink代码生成
Simulink是一种基于图形的编程环境,用于建模、仿真和分析动态系统。它是MathWorks公司的MATLAB软件的一个附加产品。Simulink代码生成是指使用Simulink模型生成可在其他…
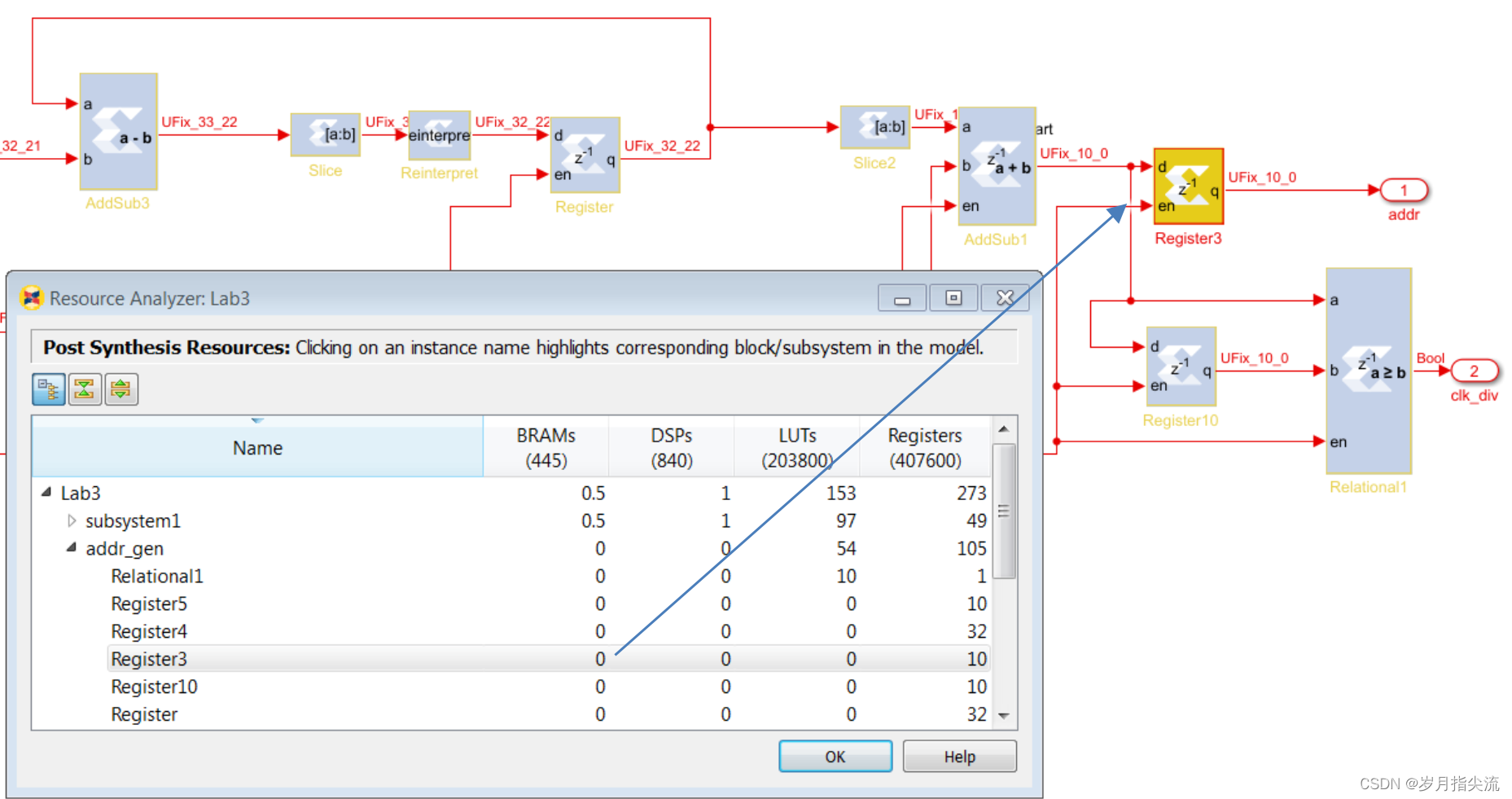
System Generator学习——时间和资源分析
文章目录 前言一、目标二、步骤三、步骤 1 :系统生成器的时序分析1、时序分析2、解决时间违规问题 四、步骤 2 :系统生成器中的资源分析总结 前言
在本节实验中,你将学习如何通过在 Simulink 中进行仿真来验证设计的功能,以确保在…